
工业AI与具身智能产教融合综合实训平台建设方案重磅发布
国家机器人创新中心简介
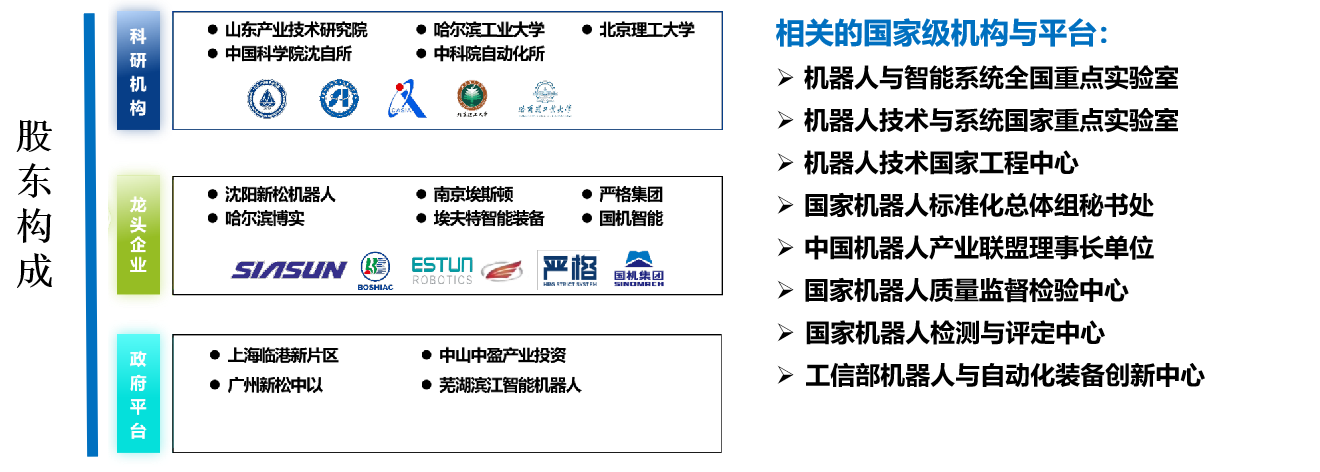
国家机器人创新中心(以下简称“中心”)是为落实《中国制造2025》规划于2017年由工业和信息化部批复设立,是在机器人领域布局建设的国家级制造业创新中心。中心由中国科学院沈阳自动化所、哈尔滨工业大学、山东省产业技术研究院等15家单位共同成立,共拥有46个研发方向,39个科研平台,员工400余人,其中高级职称占比30%以上。中心面向产业中关键共性问题,广泛开展技术开发、技术服务、成果转化及人才培养等业务。
01
项目背景
工信部2025年工作部署指出:深入开展“人工智能+制造”行动,分级分类深化工业互联网应用,大力培育工业智能体。这为加速产业结构优化升级,推动工业经济高质量发展指明了方向。由“工业AI+具身智能”共同构成的“工业智能体”,是制造业智能化升级的关键抓手,已经成为新型工业化与新质生产力提升的关键引擎,是实现高品质柔性生产和提质增效的核心技术支撑,是重塑制造业竞争优势的关键所在。

“工业智能体”重塑制造业竞争力
国家系统推进“人工智能+”的行动中,工业大模型、工业互联网、数字化、网络化和智能化水平的持续提升,正带动产业链和供应链的韧性与核心竞争力的跃升!
数据显示,我国工业机器人密度正在快速增长!相反,机器人相关领域的人才缺口正持续加大,在2024年工业机器人应用人才缺口已达 300 万人,2025年将突破到450万人,尤其是兼具 “工业场景实操能力 + 智能算法应用能力” 的复合型人才供给严重不足。
02
项目重要性
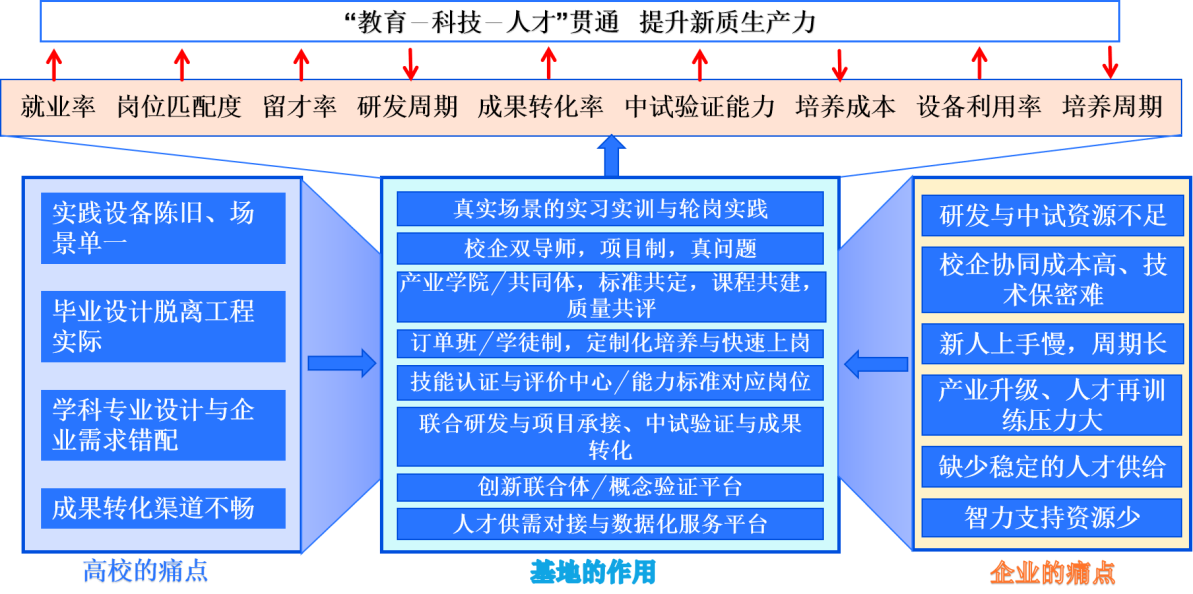
制造业强国的在战略目标的实现关键在于人才。人才队伍建设虽经多年发展,但仍存在高端复合型人才严重不足,人才培养与企业需求脱节,工程教育实践环节薄弱,学校和培训机构基础能力建设滞后等问题,企业参与人才培养的主动性和积极性普遍较低,产教融合难以深入推进,需通过深化改革创新尽快加以解决。
高校作为人才培养主阵地,课程设置需要兼顾行业需要与学术研究的需求,课程内容偏重理论,学生毕业时工程实践能力缺失,难以达到企业要求!
校企协同是促进“教育链-人才链”、“产业链-创新链”有机衔接的重要举措,但实际过程中,由于双方目标、机制和利益诉求的不同,难以有效的调动双方积极性!
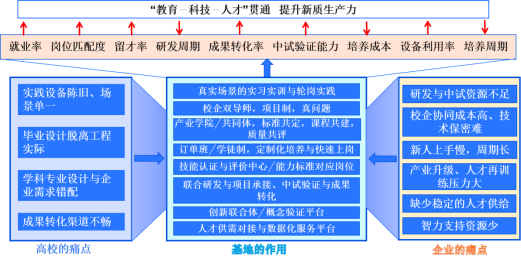
建立产教融合综合实训平台,是促进产教融合和校企协同、加快产业智能化转型和提升区域经济发展活力的有效手段,主要表现在:
1. 训、教、研、试一体化的产教融合综合实训平台,有效解决校企痛点面向训、教、研、试一体化的产教综合实训平台,把企业真实场景与理论教学相结合,将人才培养、科研攻关与工程试验在同一体系内闭环运行,贯通“人才培养-科研攻关-场景试验-规模转化”全过程,构建“企业牵头-高校支撑-产业协同”的创新联合体,系统性解决机器人和智能制造领域长期存在的供需错配、课程滞后、实训不足和企业融入度低等痛点问题。
2. “工业AI+具身智能”是制造业智能化升级的关键抓手
国家层面将“人工智能+”上升为战略行动,是制造强国建设的重要方向,大力推动智能体广泛应用,促进生产力跃迁和生产关系变革;强调其在“十五五”及中长期的主导作用。打造面向制造业的“工业AI”与“具身智能”体系,贯通设备、产线、车间企业到行业的全链路智能化。将工业AI的“认知大脑”与具身智能的“物理身体”深度融合,形成从感知-认知-决策-控制-反馈的智能体闭环,推动制造从“自动化”迈向“自主化”。将在研发、中试、生产、质检、运维、营销和服务等全流程中,显著缩短开发周期、提升排程与协同效率,使设备从“被动执行”转为“主动决策”。“工业AI+具身智能”技术的广泛应用,是实现提质增效、人机协同、柔性制造、小批量多品种制造、高自主作业的全域纵深制造体系的基础手段,为提升供应链韧性与重塑全球竞争力提供强有力的支撑。
3. “工业AI+具身智能”产教融合综合实训平台的意义重大
填补人才缺口:当前制造业智能化升级浪潮中,“工业AI + 具身智能”技术人才供不应求。传统教育体系培养的人才难以快速适应这一新兴领域的复杂需求,产教融合实训基地能精准对接产业需求,定向培养掌握前沿技术的专业人才,为产业输送新鲜血液,填补巨大的人才缺口。
加速技术落地:该领域技术迭代迅速,新理论、新算法不断涌现,但科研成果向实际生产转化存在障碍。实训基地搭建了训、教、研、试一体化平台,学校和科研机构的科研成果能在基地中结合工业实际场景进行验证和优化,加速“工业AI + 具身智能”技术在制造业中的应用和推广,推动产业技术革新。
增强产业竞争力:在全球制造业竞争加剧的背景下,掌握“工业AI + 具身智能”技术的企业更具竞争优势。通过实训基地培养的专业人才进入企业后,能够帮助企业提升智能化生产水平,提高生产效率和产品质量,增强产业的整体竞争力,使本国制造业在全球产业链中占据更有利的位置。
03
总体方案及目标
以国家机器人创新中心的技术优势和行业背景为依托,联合高校、企业及政府,以工业AI与具身智能为切入点,面向未来为人工厂及新质生产力的培养。基地以具备 “教学实训、技能培训、技术研发、企业服务” 等功能的工业场景(如:碳纤维铺贴、柔性装配、智能焊接、智能涂胶等)为载体,构建产教融合新生态,形成协同育人新体系,为提升区域经济发展活力提供技术共研与服务平台。
1. 关键机制
1) 以“产业学院/联合体”为组织载体,打通“人才培养—标准共建—质量评价”闭环,形成校企权责清晰、利益共享的常态化合作机制,破解“合而不融、校热企冷”。
2) 以“真实业务场景+项目制”贯穿培养全过程,把企业“真问题”转化为毕业设计与课程课题,联合导师共评,显著提升工程实践能力与成果转化率。
3) 以“双师型队伍+互聘互用”补齐高校工程化短板,企业工程师参与授课、项目与评价,高校教师入企实践反哺教学与科研。
4) 以“订单班/学徒制”实现招生即招工、入校即入企,缩短上岗适应期,缓解结构性缺工与新人培养成本高的矛盾。
5) 以“实训基地+中试平台+技能认证”构建能力标准与评价闭环,把企业技术标准、职业标准转化为教学与评价标准,提升人才与岗位的适配度。
6) 以“创新联合体/环大学-园区科技园”承接校企联合攻关与概念验证—中试—量产的转化链条,打通成果转化“最后一公里”
2. 建设要点与落地路径
1) 以国家机器人中心为依托,建立共性技术平台与中试验证体系
构建“一核心、三平台”的技术底座:充分发挥国家机器人创新中心在机器人领域的技术积累和行业影响力,围绕适应当地经济发展需求的智能制造技术为核心,同步建设“技术创新平台(原理研究与验证)—应用创新平台(行业场景与系统集成)—中试研发服务平台(小批量试制与工艺熟化)”,打通“原理创新—技术试验—工程研发—中试熟化—应用体验”全链条,解决从论文到产品、从样机到产线的“死亡之谷”。
2) 建设“共享型工程化能力”机制。
围绕解决中小企业“用得上、用得起”的痛点,打造“场景实验室+开放课题”。围绕本地主导产业(如汽车零部件、新能源、3C、医药等),由企业“出题”、平台“答题”,以场景契约为牵引组织联合攻关与样机验证,形成可复制的系统解决方案与标准包,降低企业试错成本、缩短导入周期。
3) 人才共育与师资共培的工程化路径
构建“中职—高职—本科”贯通的人才培养体系与“现场工程师”到“卓越工程师”的梯次人才培养路径,配套“企业学徒班/订单班/双元制班”,实现专业设置、课程内容与岗位能力的精准对接。建立“双师双能”教师队伍与“教师企业实践流动站”。实施“产业教授互聘”“企业工程师驻校”“教师进厂实训”常态化机制,将企业真实项目、工艺标准与质量体系转化为教学资源,形成“教随产出、课随岗变”的动态更新机制。
4) 以“竞赛—实训—就业”闭环提升人才质量。
共建职业技能竞赛协同平台,联合组织省市级/国家级赛事,打造“联合培育—竞赛引领—实训贯通—就业联通”的人才加速器,并通过跨区域协同破解地域性人才结构性短缺。
5) 研发到转化的协同攻关与数据要素流通
依托国家机器人创新中心,共享“工业AI数据”与“具身智能多场景训练数据”,在合规与安全前提下沉淀高质量多模态数据,服务算法训练、评测基准与场景适配,缓解实际应用中“懂算法的缺数据、有数据的缺算法”的双向瓶颈,产业需求旺盛。
6) 完善“标准—检测—认证”体系
以国家机器人检测与评定中心为依托,推动核心零部件、整机与系统级标准的制定与贯标,开展安全、可靠性、信息安全与功能安全测试,以标准牵引质量提升与规模化应用。

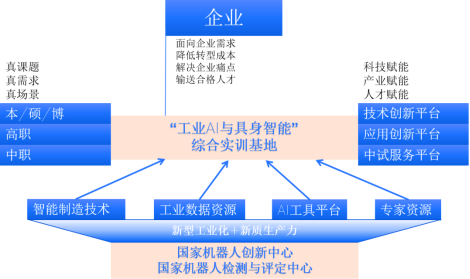
国家机器人创新中心对基地的支撑作用
04
碳纤维铺贴场景建设方案
1. 建设背景与目标
碳纤维复合材料因其轻量化、高强度特性,广泛应用于航空航天、新能源汽车、风电叶片等领域,但其铺贴工艺(如预浸料裁剪、定位、层间对齐、缺陷控制)依赖人工经验,存在效率低(人工铺贴速度约0.5-1m²/h)、一致性差(叠层误差>0.3mm)、废品率高(>15%)等问题。工业AI与具身智能的融合可解决上述痛点:工业AI通过视觉/力学感知与工艺大模型优化铺贴路径与参数,具身智能(协作机器人、柔性末端执行器)实现高精度自主铺贴。
2. 建设方案
1) 核心定位
教学端:支撑“智能制造工程”“复合材料成型”“机器人工程”等专业,培养“AI算法开发+具身智能操控+工艺优化”的复合型技术技能人才;
研发端:联合企业攻关碳纤维铺贴中的“异形件自适应铺贴”“缺陷实时检测”“多机器人协同”等技术难题;
中试端:验证工业AI(视觉定位/工艺决策)与具身智能(柔性铺贴机器人)的协同效能,推动技术从实验室到产线的落地;
产业端:服务中小碳纤维制品企业,提供“小试-中试-量产”技术孵化,助力高端装备轻量化升级。
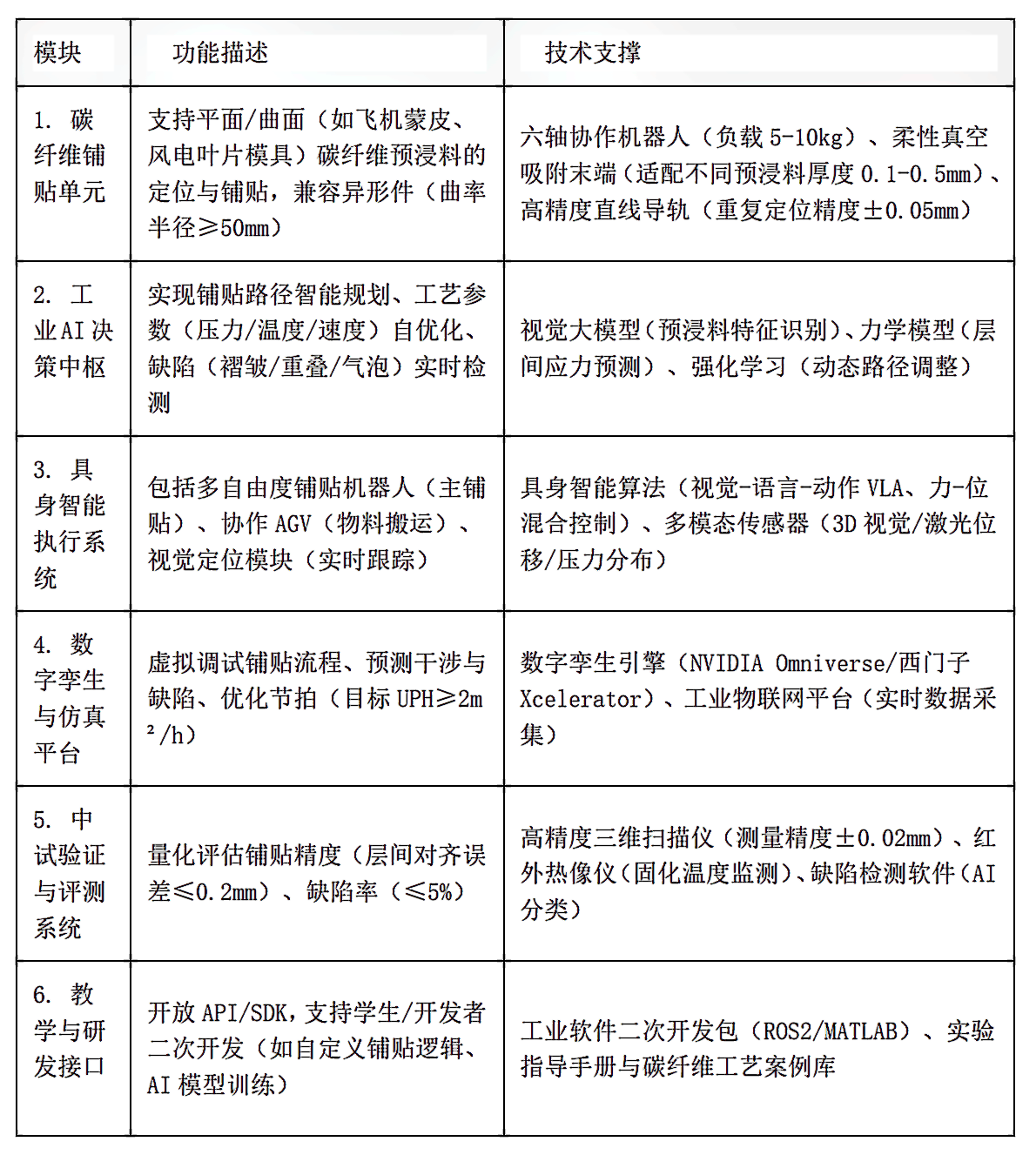
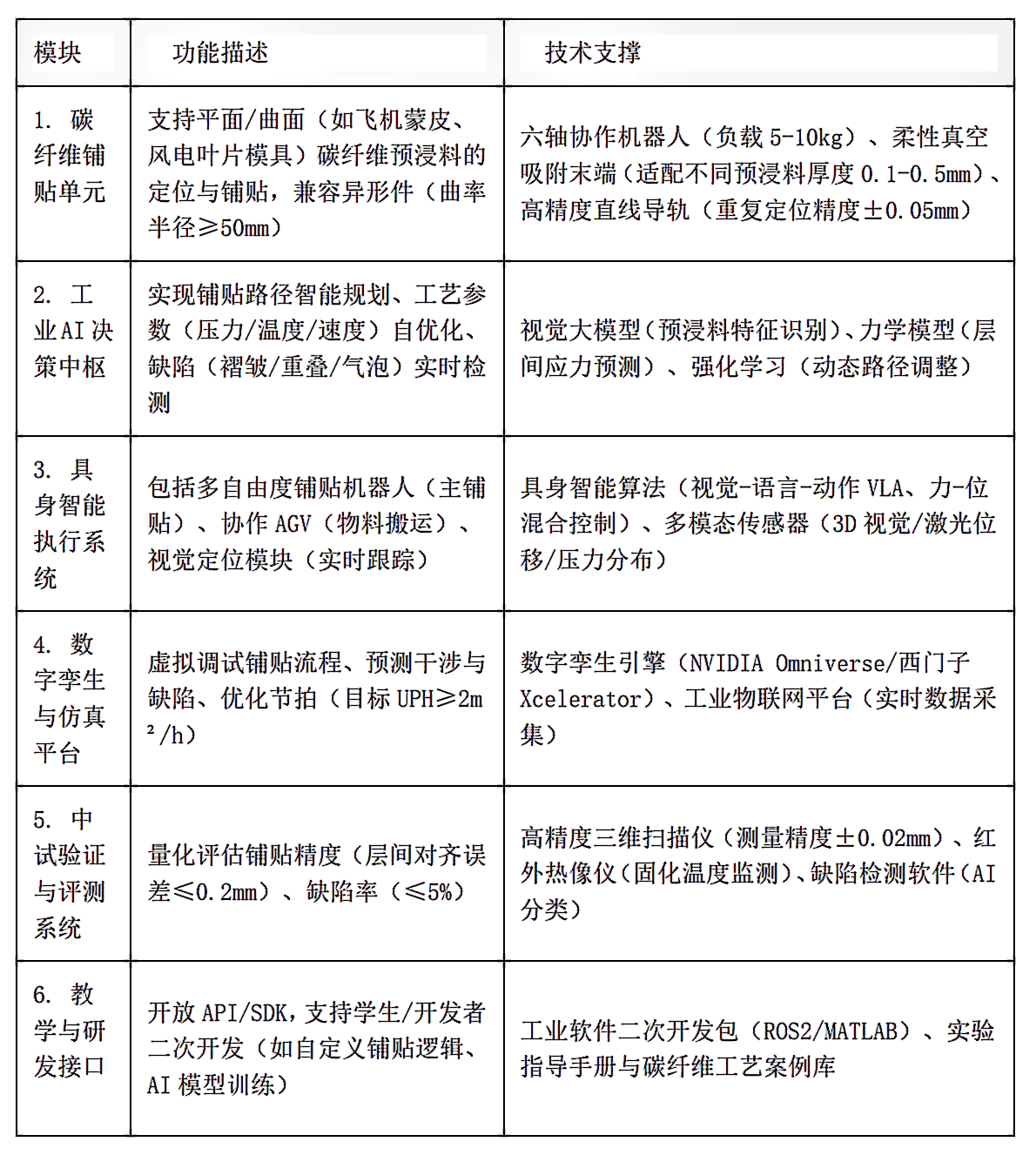
2) 核心模块
采用“模块化柔性产线+AI决策中枢+具身智能执行系统”架构,覆盖“感知-决策-执行-反馈”全流程,核心模块包括:

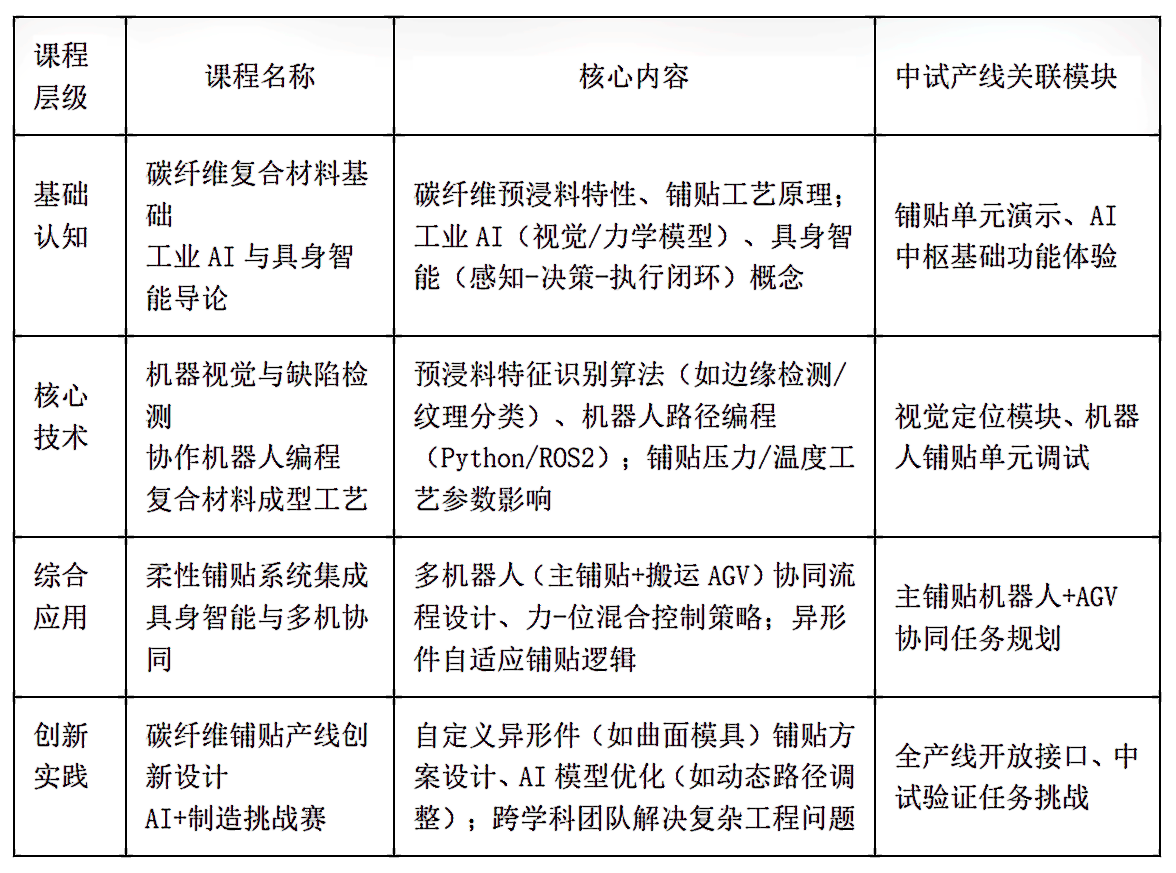
3) 支撑课程体系
构建“基础认知→核心技术→综合应用→创新实践”四级课程模块,覆盖专科/本科/研究生层次:

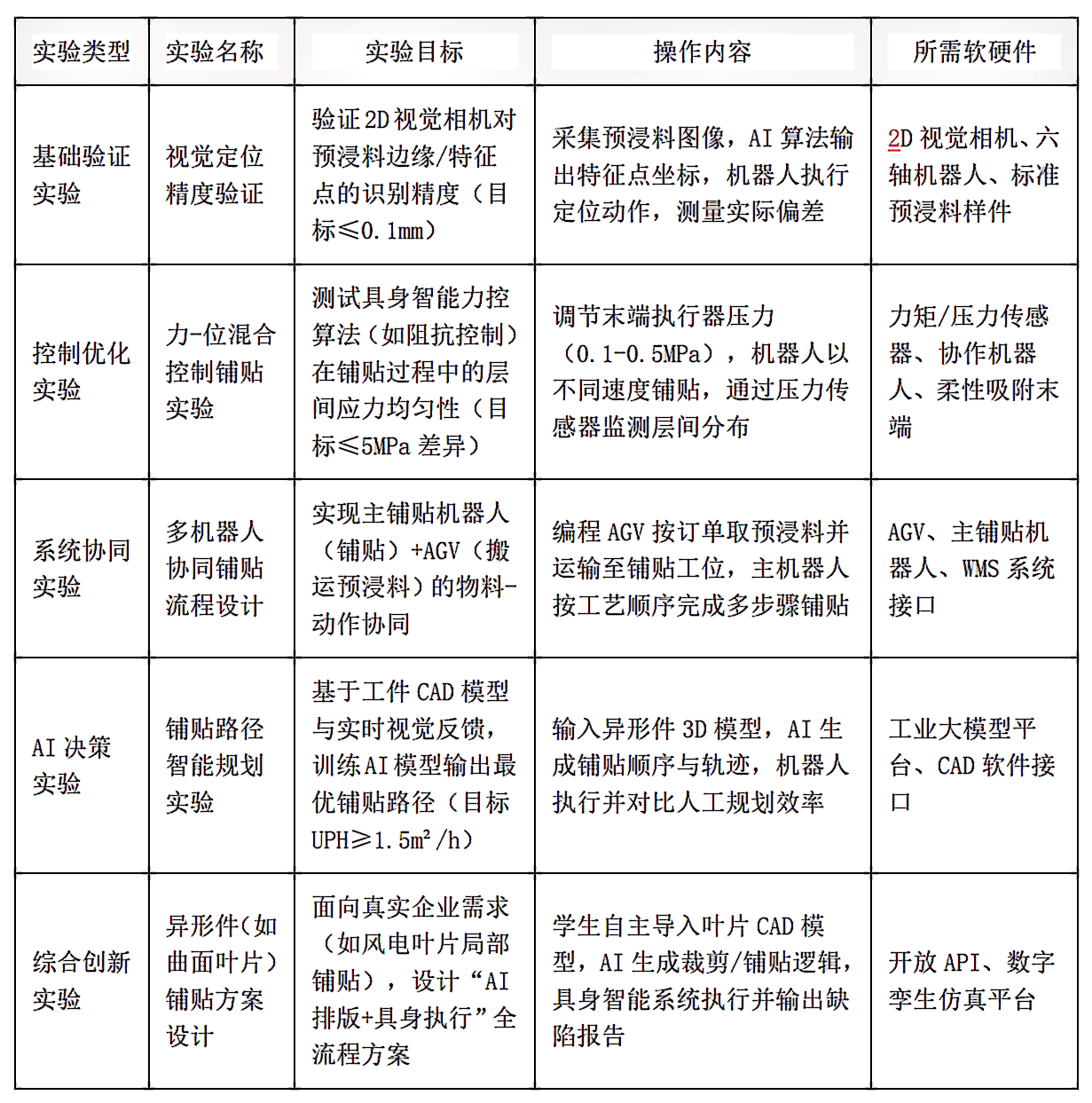
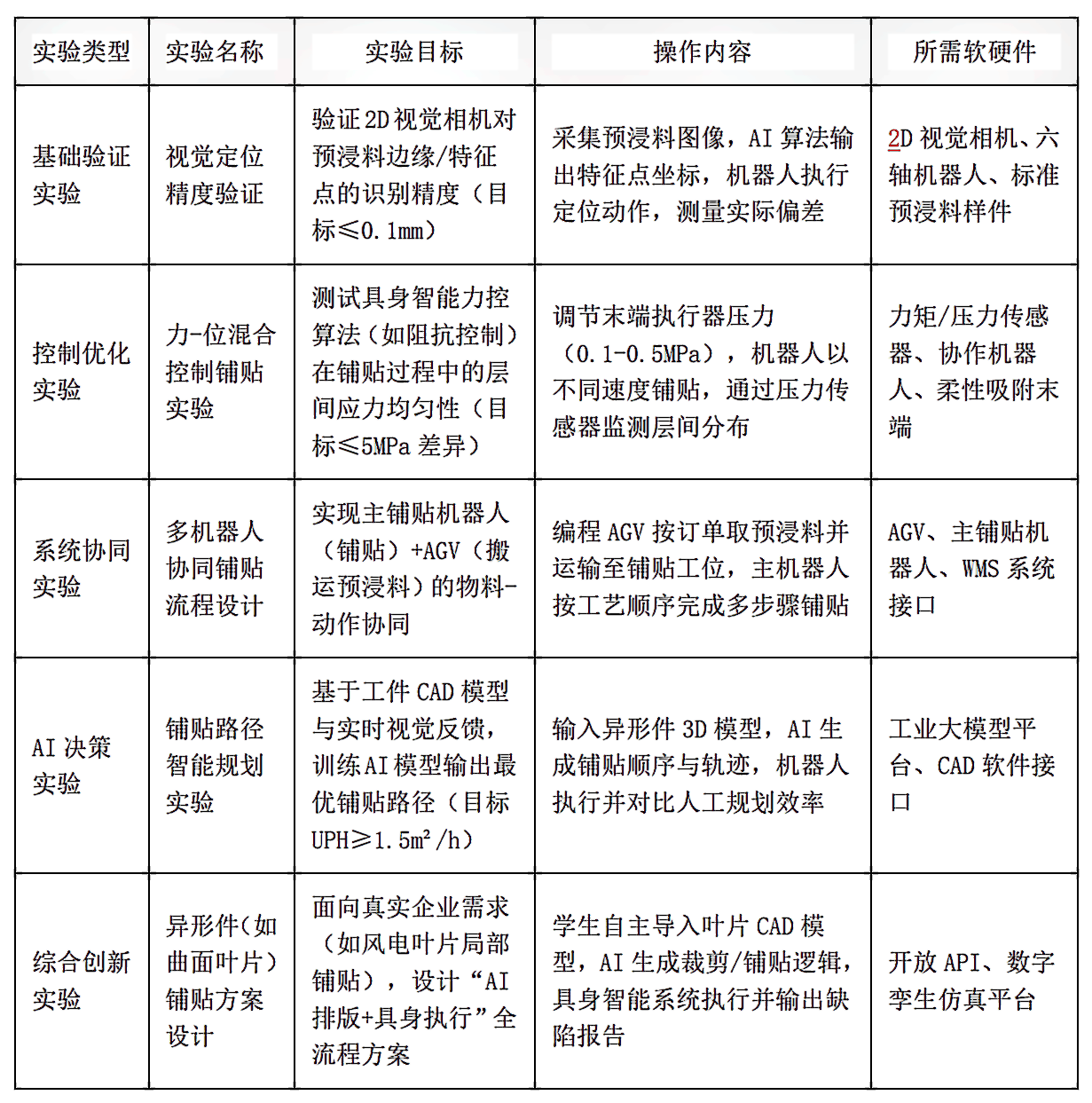
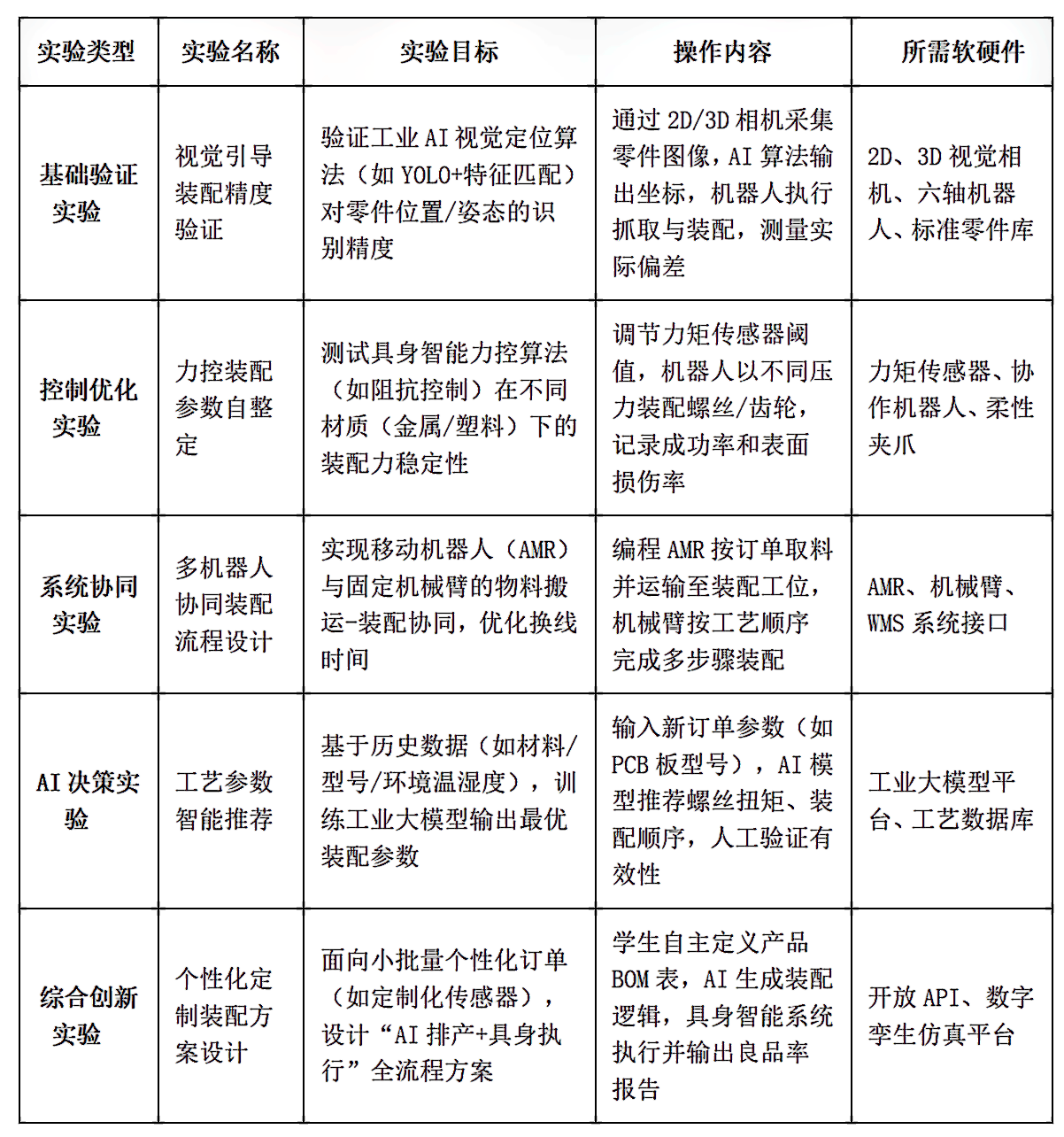
4) 实验项目设计
围绕“验证-优化-创新”目标,设置分层级实验:
5) 技术研发方向
聚焦产业痛点,联合企业开展技术攻关:
工业AI方向:多模态数据融合(视觉+力学+CAD模型)的铺贴路径优化模型、小样本学习的异形件自适应工艺生成算法;
具身智能方向:复杂曲面下的机器人自主柔顺铺贴(力-位混合控制)、预浸料动态吸附与防移位技术(真空-磁吸复合夹持);
系统集成方向:数字孪生驱动的虚拟调试技术(提前预测褶皱/重叠风险)、边缘计算与实时控制(毫秒级响应)。
6) 中试验证内容
针对企业真实需求,提供“样品试制→工艺验证→小批量试产”全流程服务:
多品种换型验证:测试产线在30分钟内完成平面件→曲面件(如飞机蒙皮→风电叶片模具)的夹具/参数调整;
高精度铺贴验证:验证0.1mm级薄层预浸料(如航空航天用T800级)的层间对齐精度(≤0.2mm);
缺陷控制验证:评估褶皱/重叠/气泡缺陷率(目标≤5%),分析工艺参数(速度/压力/温度)的影响规律;
极端环境适应性:模拟车间温湿度波动(20-30℃/40-80%RH)下的系统稳定性。
7) 实施路径与预期成效
建设周期:6-12个月(分阶段:方案设计→硬件部署→软件集成→课程开发→试运行)。
预期成效:
教学端:年培养300-500名掌握“AI+具身智能+碳纤维铺贴”的复合型技术技能人才;
研发端:联合企业解决3-5项关键技术难题(如异形件铺贴效率提升40%以上);
中试端:验证技术可行性,推动1-2项成果产业化(如航空航天/风电叶片铺贴方案落地);
产业端:服务区域中小碳纤维企业,降低废品率至≤8%,提升铺贴效率2-3倍。
8) 典型场景拓展
案例 1:飞机机翼碳纤维铺贴线
核心痛点:机翼蒙皮为双曲度曲面,碳纤维预浸料需按 0°/45°/90° 方向铺贴,传统人工铺贴易产生气泡(气泡率超 8%),且纤维方向偏差超 2°,影响结构强度。
具身智能技术应用:碳纤维铺贴机器人搭载张力控制系统(精度 ±1N),保证预浸料铺贴时张力均匀;多轴变位机带动机翼模具旋转(0-90°),配合机器人实现曲面贴合;红外热像仪实时监测铺贴温度(60-80℃),超声扫描仪检测气泡(分辨率 0.1mm),发现气泡时机器人自动调整加压压力(0.2-0.4MPa)与时间(30-60s),消除气泡;基于数字孪生技术模拟铺贴过程,优化铺贴顺序,避免纤维褶皱。
案例 2:电动汽车电池壳碳纤维铺贴
核心痛点:电池壳为一体化成型结构,需铺贴 10 + 层碳纤维预浸料,传统铺贴设备无法精准控制层间对齐度(偏差超 0.5mm),导致电池壳抗冲击性能不足。
具身智能技术应用:采用 “视觉定位 + 力控加压” 方案:3D 视觉系统扫描已铺贴层,获取定位基准(精度 ±0.03mm),引导机器人对齐新预浸料;机器人末端集成压力传感器,控制铺贴压力(0.3MPa),确保层间紧密贴合;铺贴后激光轮廓仪检测层间高度差(要求≤0.1mm),数据反馈至路径规划软件,自动修正下一层的铺贴位置。
05
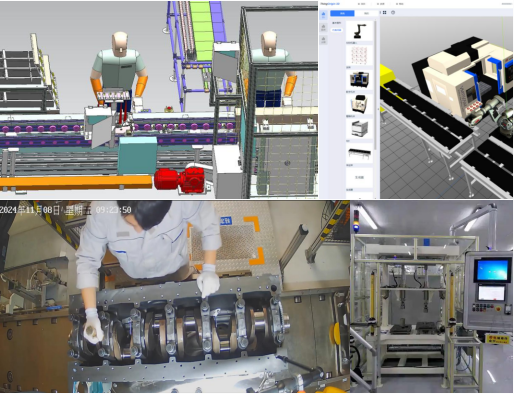
柔性装配场景建设方案
1. 建设的必要性
柔性装配是自动化装配的重要发展方向,面向 3C 电子、汽车零部件等行业,解决 “多品种、小批量” 生产中的柔性抓取、精密对接、力控装配等问题等,使生产线能够在多品种、小批量乃至变型频繁的场景中稳定运行,被视为从“刚性自动化”走向“智能制造”的关键环节。它以装配中心与装配机器人等为核心,构建柔性装配系统 ,契合现代制造业由大批量向多品种、个性化演进的趋势,对质量、效率与成本的综合提升、支撑重大装备与高端制造的自主可控、增强供应链韧性与企业竞争力具有重要意义。柔性装配的落地依赖“产线数字化+工艺数据化+决策智能化”的系统工程,牵引工业机器人、机器视觉、传感器、工业软件与标准体系的协同进步,推动企业由“设备换人”迈向“数据驱动的持续改善”。同时,它倒逼工程教育与职业教育重构课程与实训体系,培养具备机械、控制、数据与系统工程能力的复合型人才,为制造业高质量发展提供长期动能。
2. 建设方案
聚焦“教学-研发-中试-验证”一体化,面向柔性装配场景(如3C电子装联、汽车零部件组装、精密仪器装配等),建设集工业AI算法训练、具身智能机器人应用开发、多场景中试验证于一体的产教融合中试产线。
1) 核心定位
教学端:支撑高校/职业院校“智能制造工程”“机器人工程”“人工智能技术应用”等专业,开展“理论+实践+创新”一体化教学;
研发端:联合企业解决柔性装配中的“多品种快速换线”“高精度装配”“人机协同”等技术难题;
中试端:验证工业AI(如视觉引导、工艺优化)与具身智能(如协作机器人、移动操作臂)的协同效能,推动技术从实验室到产线的落地;
产业端:服务区域中小制造企业,提供柔性装配解决方案的“小试-中试-量产”技术孵化。
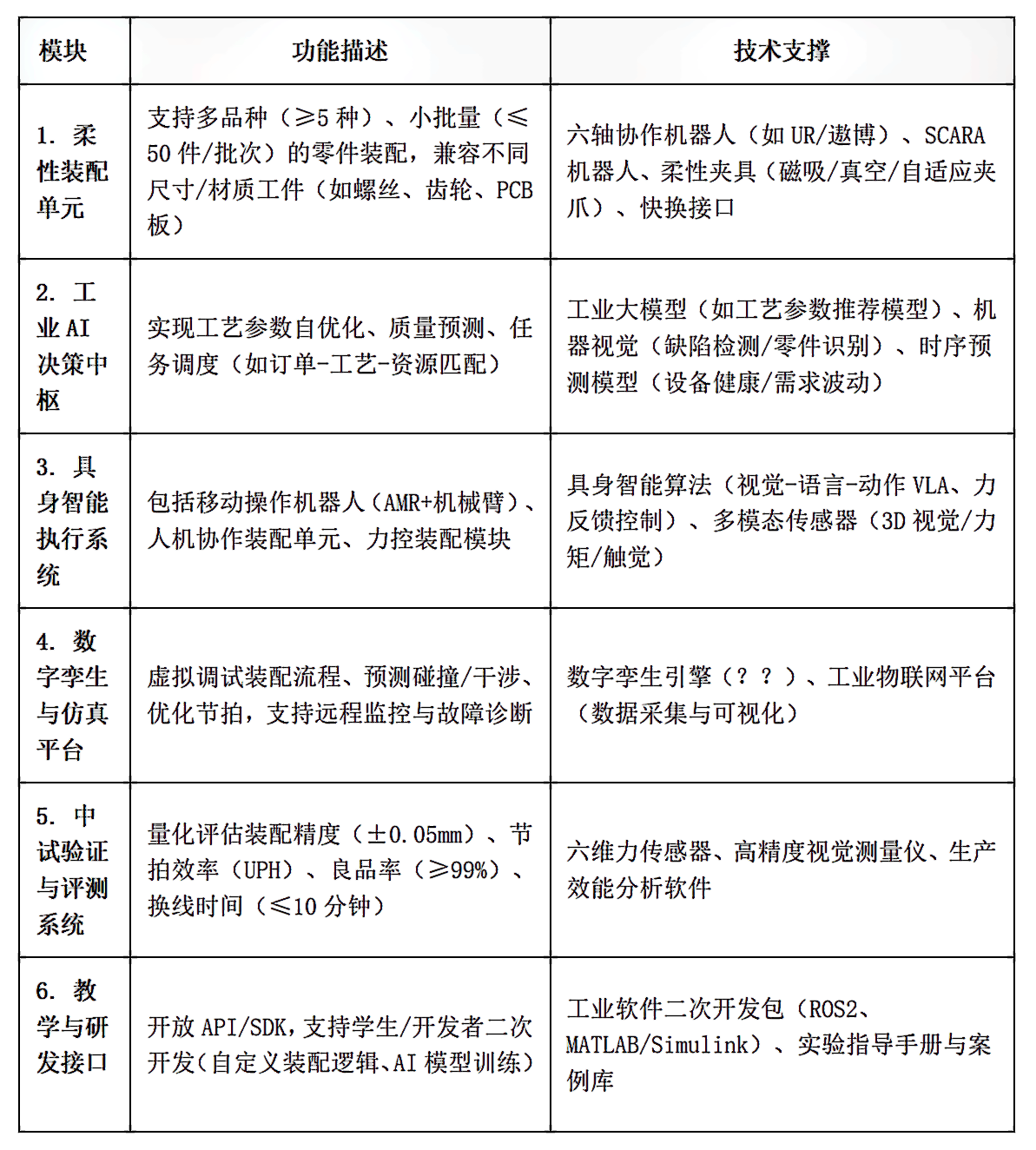
2) 核心模块
采用“模块化+柔性化+智能化”设计理念,覆盖“感知-决策-执行-反馈”全流程,核心模块包括:

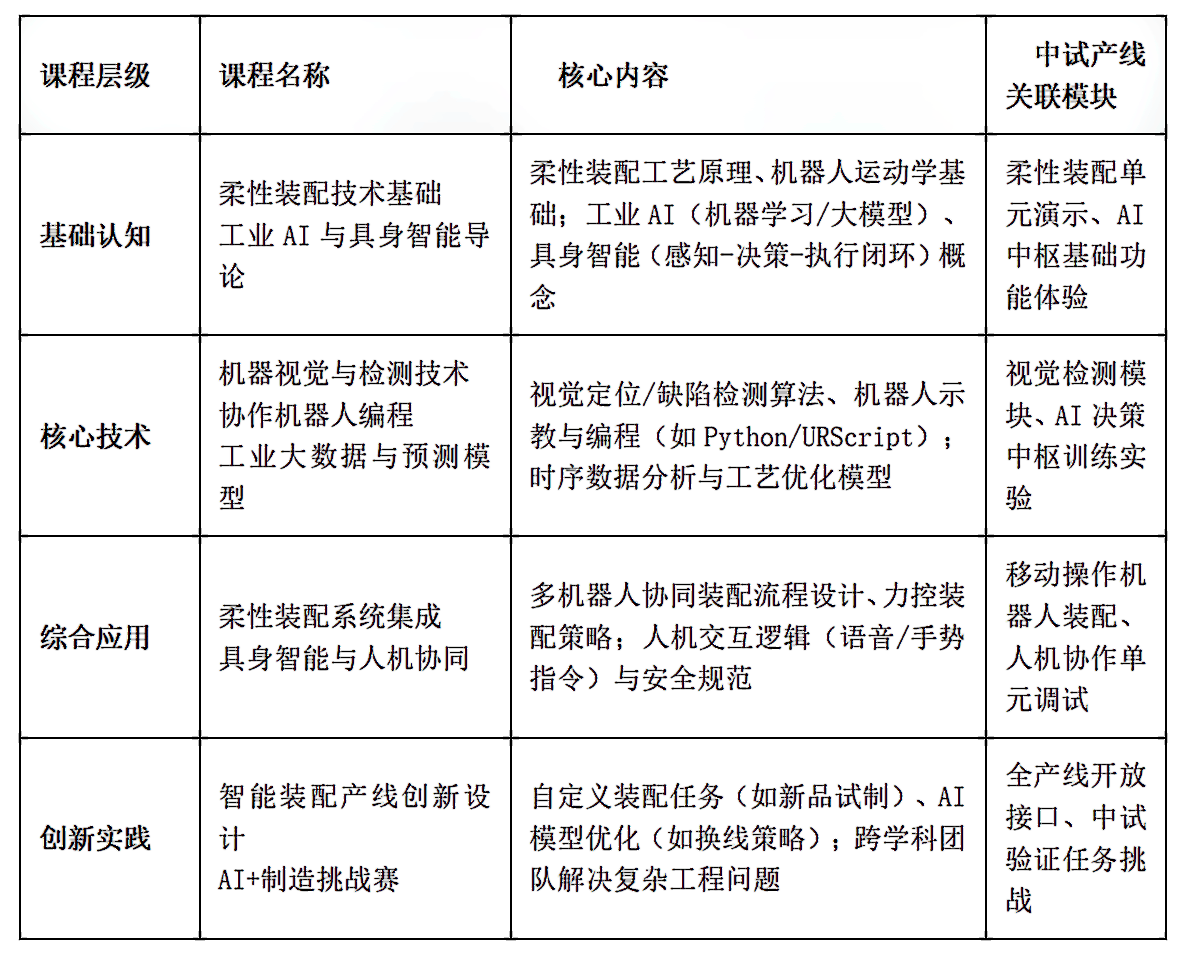
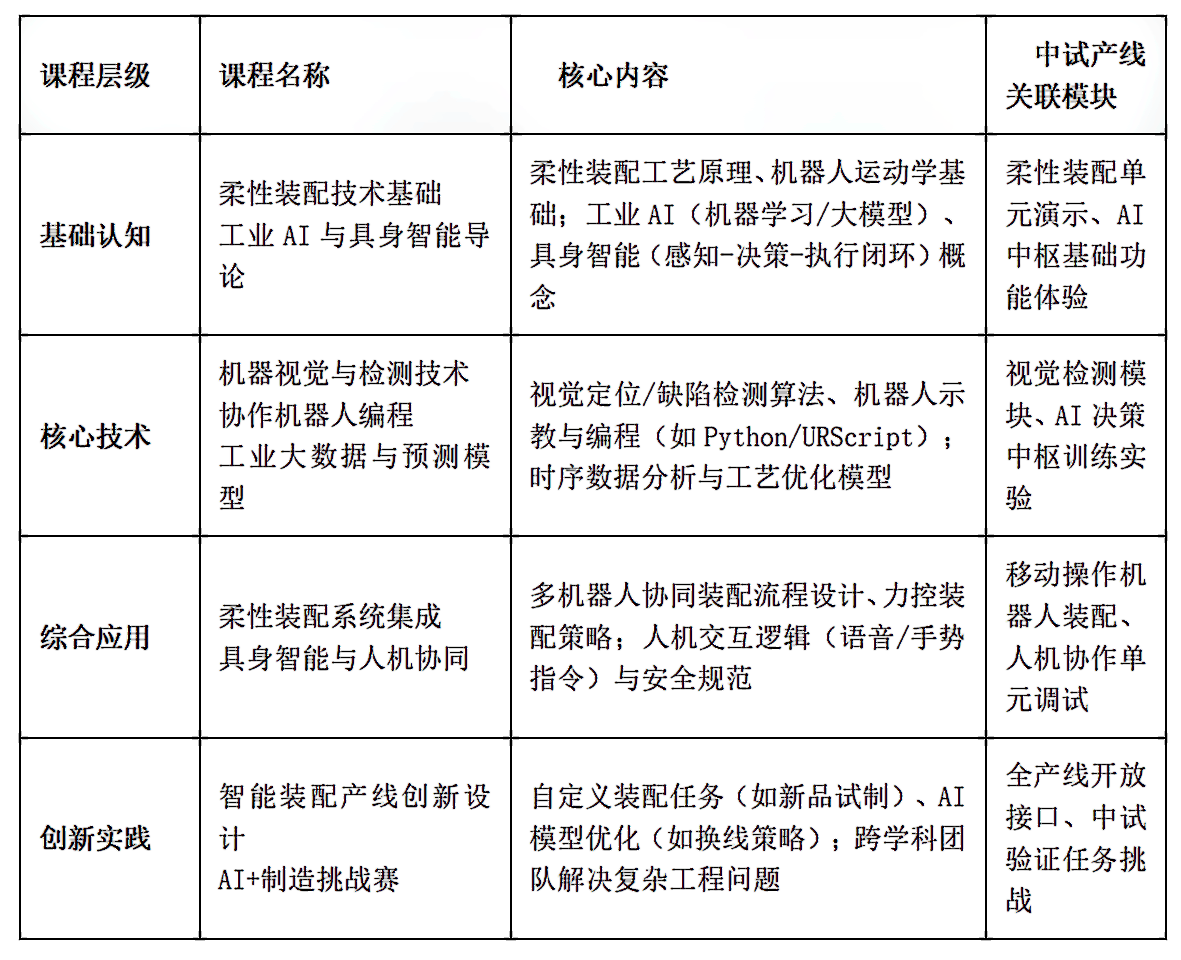
3) 支撑课程体系
构建“基础认知→核心技术→综合应用→创新实践”四级课程模块,覆盖专科/本科/研究生层次:
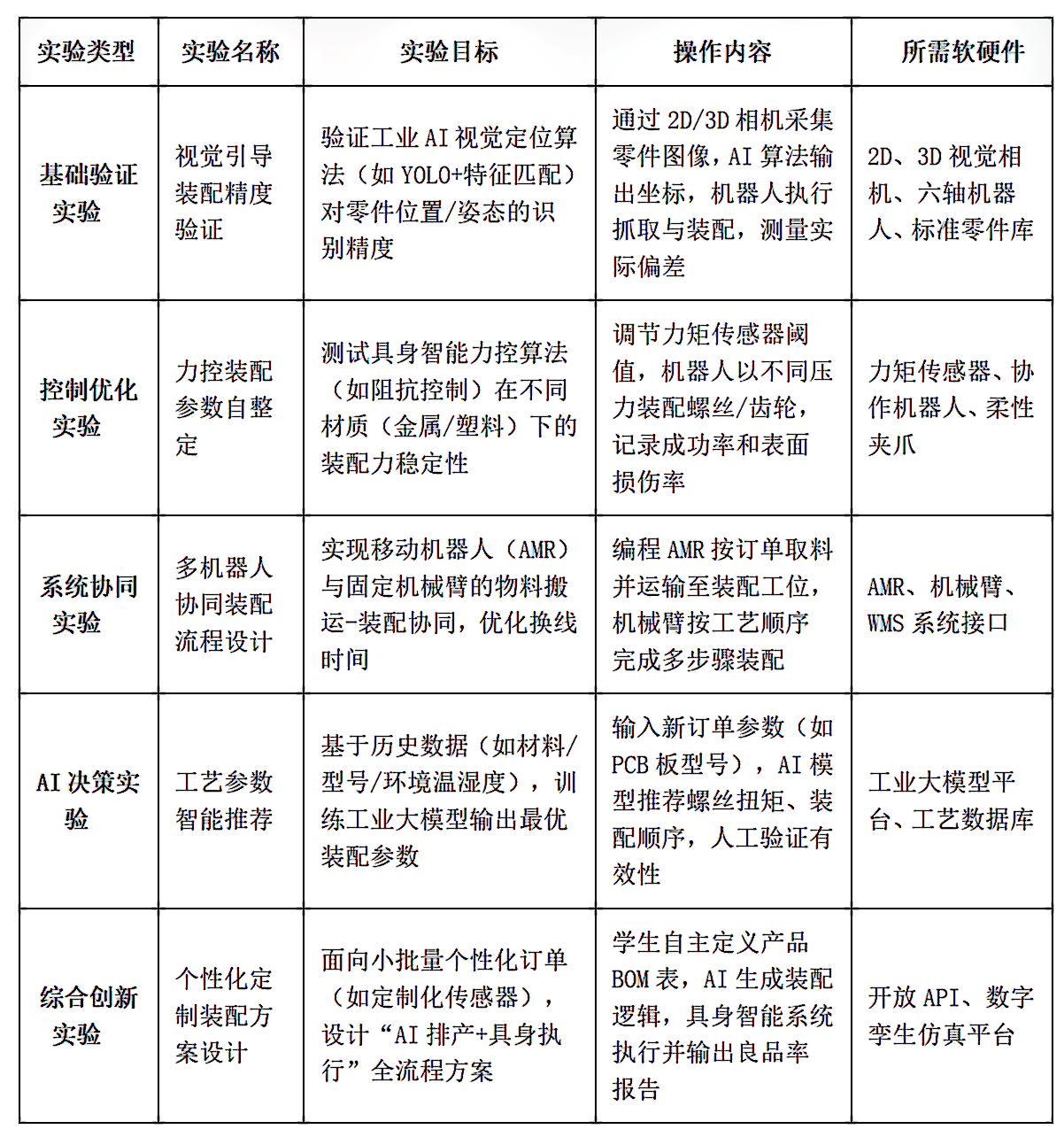
4) 实验项目设计
围绕“验证-优化-创新”目标,设置分层级实验:
5) 技术研发方向
聚焦产业痛点,联合企业开展技术攻关:
工业AI方向:多模态数据融合(视觉+力觉+声纹)的装配质量预测模型、小样本学习的快速换线工艺适配算法;
具身智能方向:复杂环境下的机器人自主导航与避障(如动态障碍物)、人机自然交互(语音/手势指令识别);
系统集成方向:数字孪生驱动的虚拟调试技术(提前验证装配流程碰撞风险)、边缘计算与实时控制(毫秒级响应)。
6) 中试验证内容
针对企业真实需求,提供“样品试制→工艺验证→小批量试产”全流程服务:
多品种换线验证:测试产线在30分钟内完成5种不同产品(如手机模组/汽车传感器)的夹具更换与参数调整;
高精度装配验证:验证0.01mm级精密零件(如芯片封装)的装配可靠性;
人机混合产线验证:评估“机器人主装配+人工抽检”模式下的协同效率与安全性;
极端环境适应性:模拟高温(40℃)、高粉尘(如铸造车间)场景下的系统稳定性。
7) 实施路径与预期成效
建设周期:6-12个月(分阶段:方案设计→硬件部署→软件集成→课程开发→试运行)。
预期成效:
教学端:年培养500-1000名掌握“AI+具身智能+柔性装配”的复合型技术技能人才;
研发端:联合企业解决3-5项关键技术难题(如小批量换线效率提升30%以上);
中试端:验证技术可行性,推动1-2项成果产业化(如定制化装配解决方案落地);
产业端:服务区·域中小微企业,降低柔性产线改造成本40%,提升生产效率20%-30%。
8) 典型场景拓展
案例 1: 3C 产品柔性装配线
核心痛点:手机主板装配涉及 20 + 种微小零件(如电容、电阻),传统自动化线换型需 2-3 小时,无法满足 “单日多机型生产” 需求;人工装配易因力度把控不当导致零件损坏,不良率超 3%。
工业AI+具身智能技术应用:采用六轴协作机器人(搭载力传感器 + 3D 视觉系统),通过强化学习算法训练 “抓取 - 对接” 动作:视觉系统实时识别零件位姿(精度 ±0.02mm),力传感器动态反馈装配力(阈值控制在 5-8N),机器人自主调整装配角度与速度;实现 6 台机器人协同,换型时通过软件调用预训练模型,换型时间缩短至 15 分钟。
案例 2:电机轴承装配
核心痛点:电机轴承与轴套的过盈配合需精准控制压装力(要求 120±5N),传统液压设备无法实时调整压力,易导致轴承变形或装配松动。
工业AI+具身智能技术应用:机器人末端集成六维力传感器,结合 PID 力控算法:压装过程中每秒采集 1000 组力数据,实时补偿机器人位移(补偿精度 ±0.01mm);通过数字孪生技术预演压装流程,提前规避干涉风险;支持与 MES 系统联动,自动记录每台电机的压装数据,实现质量追溯。
06
工业AI与具身智能应用场景定制
1. 智能焊接场景
面向汽车制造、工程机械行业,解决 “多工件类型、复杂焊缝(如曲线焊缝、多层多道焊)” 的自动化焊接问题,典型应用如汽车车架焊接、挖掘机结构件焊接。
案例 1:机械挖掘机结构件焊接线
核心痛点:挖掘机斗杆为厚钢板曲面结构(厚度 20-30mm),需进行多层多道焊,传统机器人焊接易因工件热变形导致焊缝偏移,需人工补焊,补焊率超 15%。
具身智能技术应用:焊接机器人搭载激光视觉焊缝跟踪系统,实时识别焊缝位置(跟踪精度 ±0.1mm),每秒调整机器人轨迹 30 次;结合红外热像仪监测焊接温度场(控制在 280-320℃),动态调整焊接电流(180-220A)与速度(300-500mm/min);通过多机器人协同算法,2 台机器人同步焊接斗杆两侧焊缝,避免单侧受热变形。
案例 2:新能源汽车车架焊接工位
核心痛点:车架为铝合金材质,焊接时易出现气孔、裂纹,且需焊接 100 + 条不同类型焊缝(直线、圆弧、角焊缝),传统示教模式编程耗时超 4 小时 / 车型。
具身智能技术应用:采用 “3D 视觉扫描 + 离线编程” 模式:视觉系统扫描车架生成点云模型,自动提取焊缝信息并生成焊接路径;基于深度学习算法预存铝合金焊接参数模板(如氩气流量 15-20L/min、焊接电压 18-22V),根据焊缝位置自动匹配参数;焊接后通过机器视觉检测焊缝外观(识别气孔、咬边等缺陷),不合格焊缝自动标记并生成返工方案。
2. 智能密封涂胶场景
面向汽车、航空航天行业,解决 “高精度涂胶(如密封胶、结构胶)、涂胶质量一致性” 问题,典型应用如汽车车门密封涂胶、飞机机身结构胶涂胶。
案例 1:汽车车门密封涂胶线
核心痛点:车门密封胶需沿门框边缘涂胶(宽度 5±0.5mm、高度 3±0.3mm),传统涂胶机器人因车门定位误差(±0.5mm)导致胶形不均,漏水率超 5%。
具身智能技术应用:涂胶机器人搭载 2D/3D 复合视觉系统,涂胶前扫描车门轮廓,自动修正涂胶路径(补偿精度 ±0.05mm);通过伺服电机控制胶枪压力(0.3-0.5MPa)与移动速度(100-200mm/s),实现 “速度 - 压力” 联动控制;涂胶后 3D 轮廓扫描仪实时检测胶形尺寸,数据反馈至算法模型,自动优化下一个车门的涂胶参数。
案例 2:飞机 机身结构胶涂胶工位
核心痛点:机身蒙皮与框架的结构胶涂胶需承受 - 55℃-120℃温度变化,要求胶层厚度均匀(2±0.2mm),传统人工涂胶效率低(1.5 小时 / 米)且质量不稳定。
具身智能技术应用:采用高精度涂胶机器人(重复定位精度 ±0.01mm),结合力控传感器控制胶枪与工件的接触力(10±2N),避免胶枪划伤蒙皮;基于 BIM 模型生成涂胶路径,支持复杂曲面连续涂胶;涂胶过程中温度传感器实时监测环境温度(控制在 20-25℃),温度波动超 3℃时自动调整涂胶速度,保证胶层固化质量。

客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1