
 272025-10
272025-10工业AI与具身智能产教融合综合实训平台建设方案重磅发布
国家机器人创新中心简介国家机器人创新中心(以下简称“中心”)是为落实《中国制造2025》规划于2017年由工业和信息化部批复设立,是在机器人领域布局建设的国家级制造业创新中心。中心由中国科学院沈阳自动化所、哈尔滨工业大学、山东省产业技术研究院等15家单位共同成立,共拥有46个研发方向,39个科研平台,员工400余人,其中高级职称占比30%以上。中心面向产业中关键共性问题,广泛开展技术开发、技术服务
查看详情 > 252024-07
252024-07机器人创新工坊科教融汇研讨会成功举办
机器人创新工坊科教融汇研讨会成功举办推动教育与科技深度融合2024年7月23日,机器人创新工坊科教融汇研讨会在武汉理工大学科技园星火数字科创中心顺利召开。本次研讨会是在国家机器人创新中心、中国科学院沈阳自动化研究所指导下,由机器人创新工坊、武汉艾克特科技有限公司主办,数字制造湖北省重点实验室、机器人与智能制造湖北省工程研究中心协办。旨在探讨如何更好地将科学教育与科技创新相融合,为培养新一代具备创新
查看详情 > 042024-06
042024-06活动通知:“机器人创新工坊”定于2024年7月21日-27日举办2024年机器人创新工坊“科教融汇”研讨会暨“机器人系统底层控制与开发”高级研修班
关于举办2024年机器人创新工坊“科教融汇”研讨会暨“机器人系统底层控制与开发”高级研修班的报名通知各高校及有关单位:“机器人创新工坊”是以专家资源及科研成果作为依托,校企联合打造集技术研发、科研创新、技术推广、成果转化、人才培养等职能于一体的新型科创综合体,结合校企双方科研资源、政府资源、产业资源等方面的优势,开展“产学研用”全方位合作,形成科研反哺教学、科研应用社会、科研服务国家的良性机制,提
查看详情 > 232023-11
232023-11【喜报】祝贺于海斌研究员当选中国工程院院士
昨日中国科学院、中国工程院分别公布了2023年中国科学院、中国工程院院士增选当选院士名单。中国科学院沈阳自动化研究所于海斌研究员当选中国工程院院士。于海斌,中国科学院沈阳分院院长、博士生导师,机器人学国家重点实验室主任。兼任中国自动化学会副理事长、全国工业过程测量控制和自动化标准化技术委员会主任委员,国际自动化学会会士。长期从事工业自动化与控制系统的研究,研发了高实时高可靠工业控制网络与复杂工业控
查看详情 >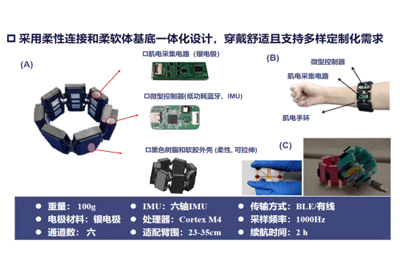 172023-11
172023-11肌电交互康复机器人系列产品研发取得新进展
人机交互机器人正在从独立进入人机共融时代。为适应复杂场景下的应用需求,新型人机交互方式急需拓展。智能肌电交互系统是基于python语言实现UI交互界面、信号采集和处理、机器人控制的一体化平台构建,方便使用机器学习方法进行二次开发,为人工智能、机器人等相关专业的基础理论和实际应用的方面人才的培养提供助力。肌电手环或成为新一代人机交互接口,通过采集人体皮肤表面的微弱的生理电信号,实现对意图指令的解码。
查看详情 >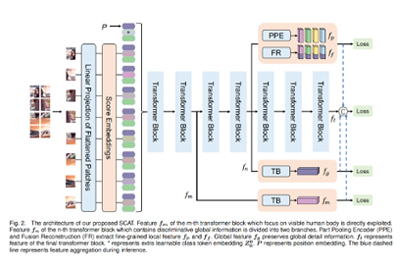 212023-08
212023-08沈阳自动化所在行人重识别领域研究取得新进展
基于Transformer注意力机制的遮挡行人重识别算法框架近日,中国科学院沈阳自动化研究所机器人视觉研究组在遮挡行人重识别领域取得新进展,提出了一种遮挡行人重识别算法。该研究成果在线发表于工业信息领域国际期刊IEEETransactionsonIndustrialInformatics(中国科学院一区Top类,IF:12.3)。 行人重识别指通过非重叠摄像头检索同一个行人目标,是行人检测和行人
查看详情 >
客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1