
肌电交互康复机器人系列产品研发取得新进展
人机交互机器人正在从独立进入人机共融时代。为适应复杂场景下的应用需求,新型人机交互方式急需拓展。智能肌电交互系统是基于python语言实现UI交互界面、信号采集和处理、机器人控制的一体化平台构建,方便使用机器学习方法进行二次开发,为人工智能、机器人等相关专业的基础理论和实际应用的方面人才的培养提供助力。
肌电手环或成为新一代人机交互接口,通过采集人体皮肤表面的微弱的生理电信号,实现对意图指令的解码。肌电手环具有便携性,可以穿戴在手臂上,便于实际场景中实时人机交互。
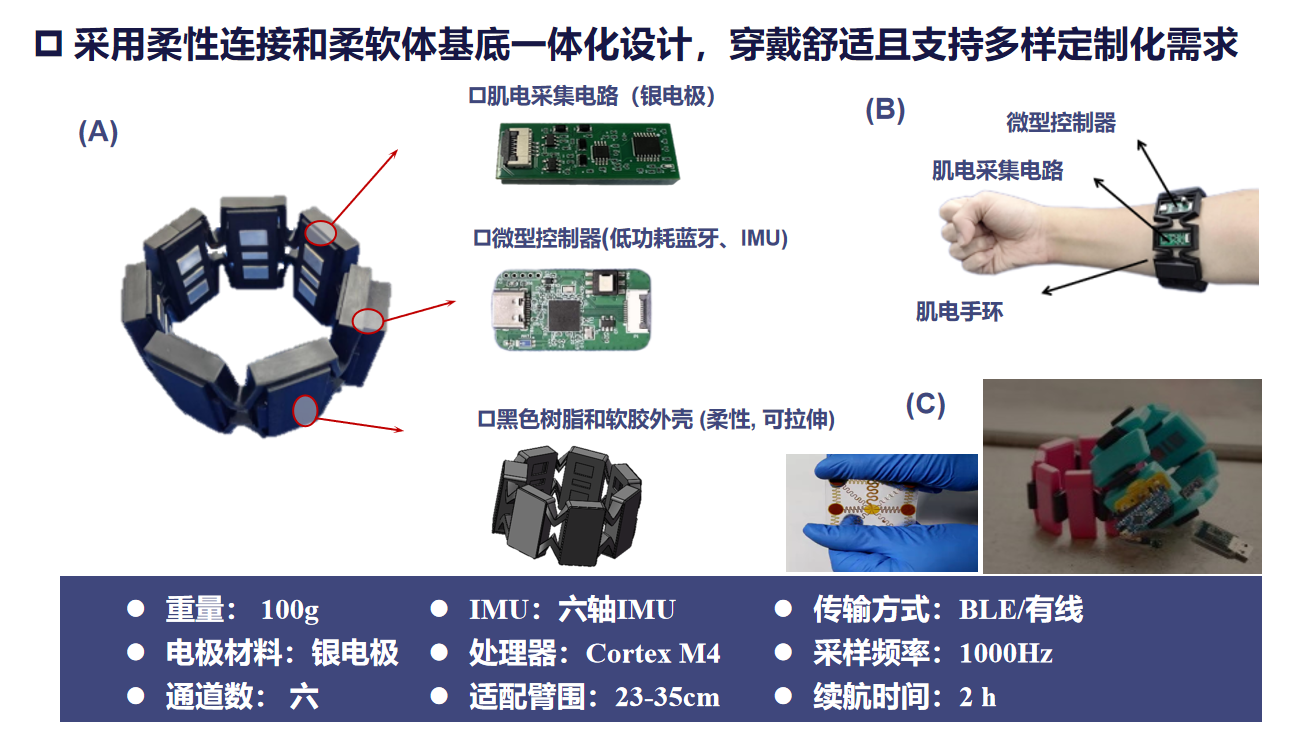
智能肌电交互系统中表面肌电意图识别技术,是人机融合智能技术发展的重要支撑技术,在智能假肢、康复机器人等领域具有重要的应用价值。面向军事需求、医疗康复等典型应用场景,研制基于肌电解码的人机交互系统并开展单兵静默式交流、面部肌电操控、康复系统交互等实验验证。

手部康复机器人分为刚性驱动手部康复机器人、智能材料手部康复机器人、软体手部康复机器人,适用不同场景。
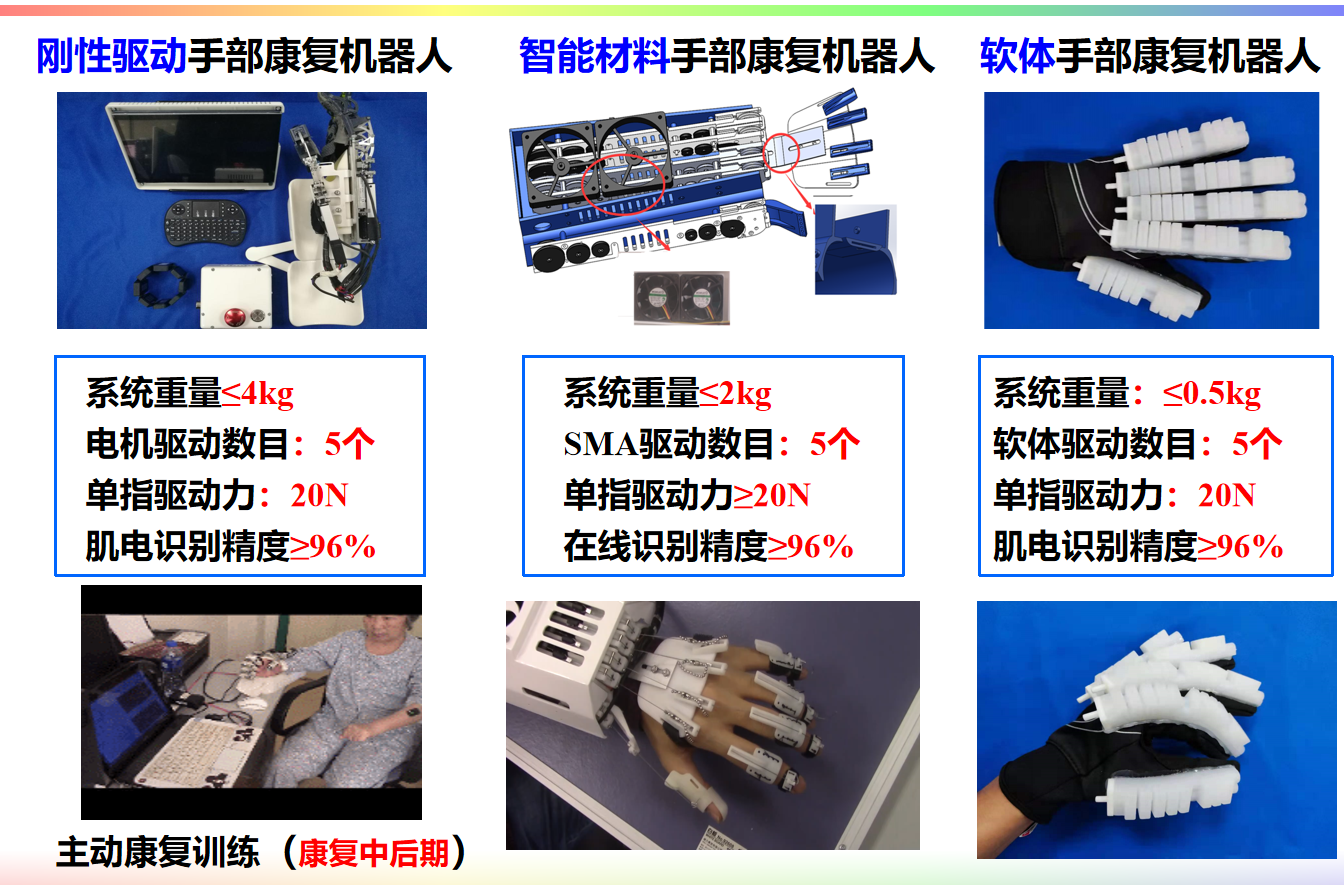
肌电交互织物康复手:利用柔性织物与肌电控制系统构建肌电交互式织物康复手,重量轻,驱动力大,交互性强,为卒中患者提供手部多方式有效训练。

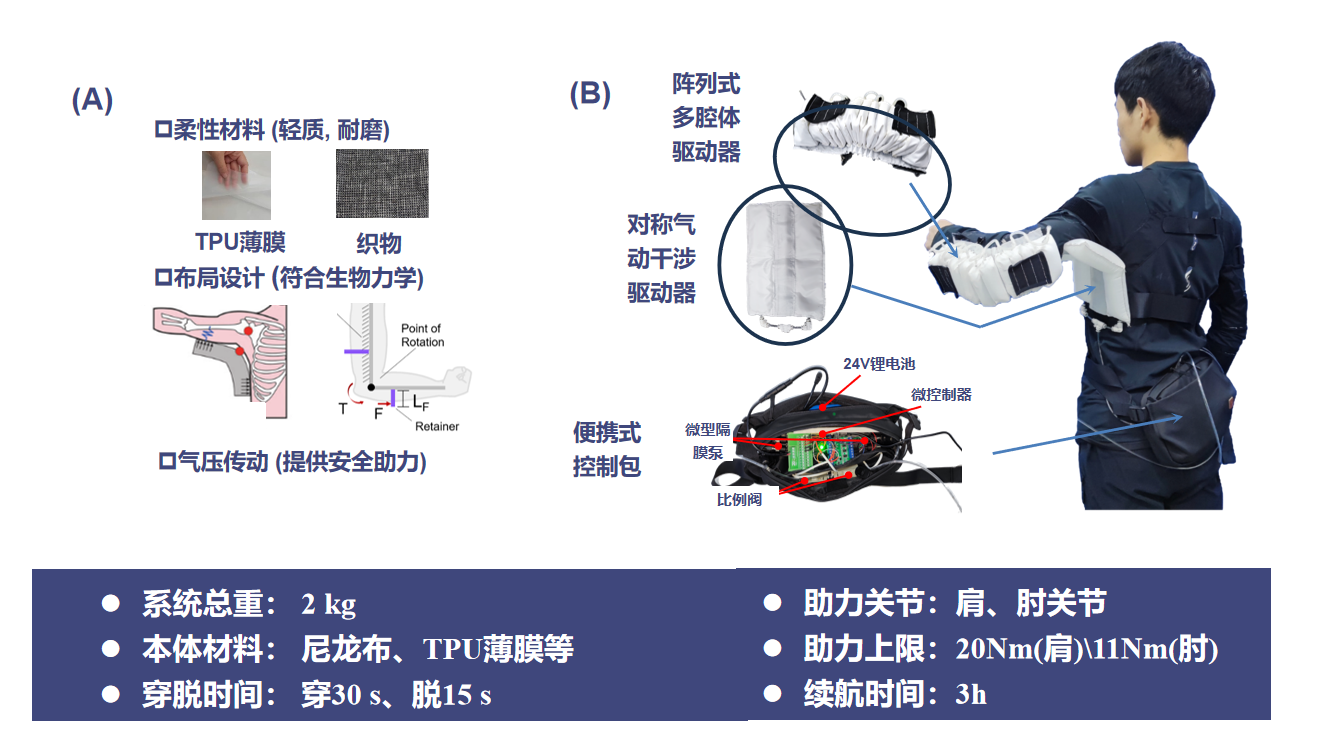
外肌肉式运动辅助机器人:利用柔性织物与柔性绳驱动构建柔性康复机器人本体,提升本质安全性

基于柔性织物的上肢运动辅助系统:可以实现肩部和肘部的协同辅助运动,降低肌肉活动,具有本质安全、轻质柔顺以及机械透明特性

客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1