
沈阳自动化所在复杂曲面机器人自动化磨抛加工领域取得新进展
近日,中国科学院沈阳自动化研究所在复杂曲面机器人自动化磨抛加工领域取得新进展,提出了一种基于六点定位原理的叶片坐标系自动标定方法,实现了航空发动机叶片磨抛加工过程中动态工件坐标系的自动标定。该研究成果于近期在线发表在计算机/制造领域期刊Robotics and Computer-Integrated Manufacturing。
作为航空装备的核心,航空发动机是一种结构高度复杂且精密的动力机械,被称为“现代工业皇冠上的璀璨明珠”。叶片是航空发动机中最为关键的零部件,其结构复杂,工况恶劣,对加工工艺的要求较高。目前航空叶片的磨抛主要形式是人工磨抛加工和专用磨床磨抛加工。随着工业机器人技术的不断发展,机器人自动化磨抛叶片类复杂曲面已经是一种必然趋势。然而,机器人系统中零件动态坐标系的自动化定位技术尚不成熟,实现航空发动机叶片的高自动化、高精度的磨抛加工具有很高的技术难度。
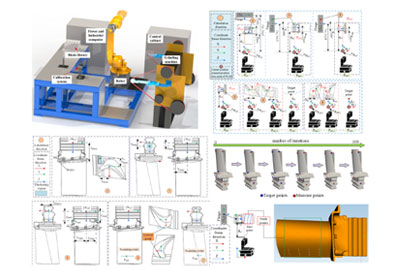
沈阳自动化所工艺装备与智能机器人研究室基于六点限位原理提出了航空发动机叶片的顺序标定策略,完成了机器人系统中动态坐标系的精准自动标定。结合建立的复杂曲面机器人自动化磨抛系统,研究团队开展了航空叶片的磨抛加工实验。实验结果表明,提出的标定策略可以实现较高精度的机器人系统动态坐标系的自动化标定,将标定精度由传统的人工精度0.2mm提高到了0.05mm,大大提高整体系统的稳定性。

客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1