
双臂力反馈遥操作机器人开放平台
联系电话:13720126958 / 13387619634一、产品简介
双臂力反馈遥操作机器人开放平台是一种由操作人员在视觉系统的辅助下通过操纵力反馈手柄控制远程机器人进行作业的机器人系统,可广泛应用于远程医疗诊疗、危险环境远程作业等领域。双臂力反馈遥操作机器人开放平台为相关领域的科研人员提供了便利的开放性实验环境,支撑科研人员快速构建各类力反馈遥操作机器人实验场景,对相关算法和软件模块进行测试。平台也可以用于各种力反馈遥操作机器人原型系统开发和操作人员培训。
二、平台功能
1.搭建力反馈要操作机器人教学科研环境
可以基于Matlab/Simulink及Gazebo/V-rep仿真环境构建力反馈遥操作机器人数字孪生仿真系统,在仿真环境下对主手端机器人的运动学模型、从手端机械臂的运动学、动力学等建立模型,并对主从机械臂各自的标定、主手到从手的运动映射过程等过程进行仿真;可以建立从手机械臂的动力学模型,对从手运行过程中的柔顺力控、虚拟墙阻抗控制等进行仿真。仿真算法可以便利的部署于物理环境下的从手机械臂控制器进行验证。可以引入5G/TSN等新型通信媒介,分析通信延时对控制系统的影响和力反馈操作体验的影响。
2.远程诊疗系统原型搭建
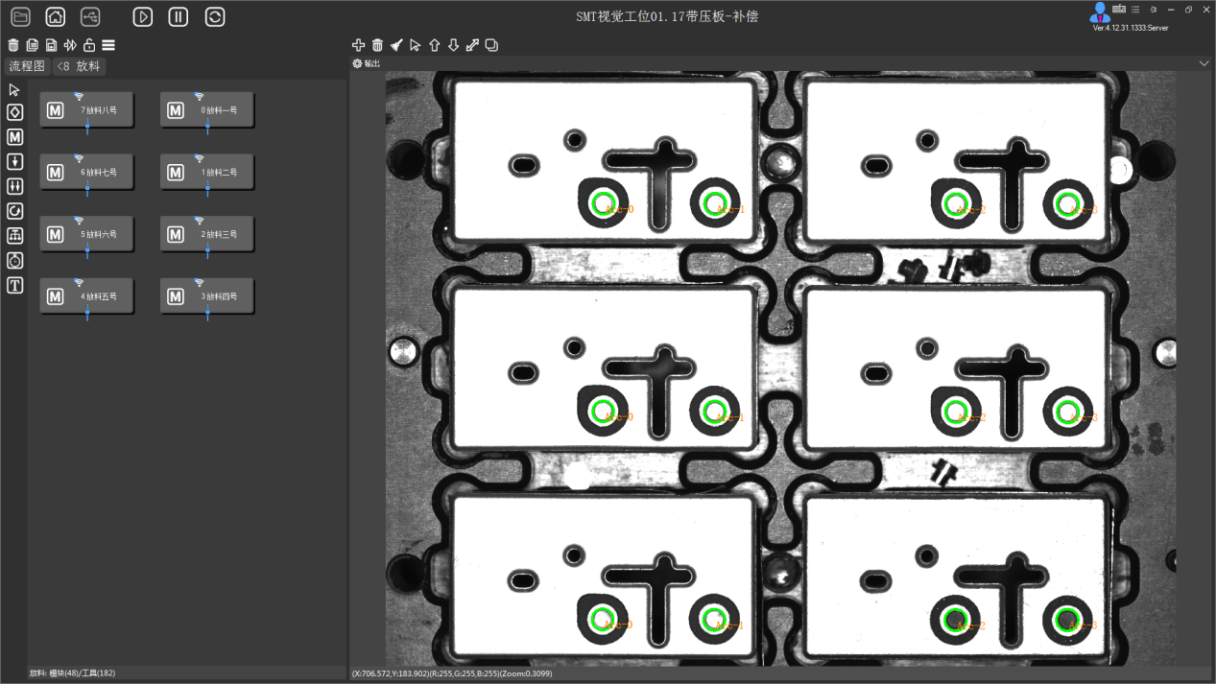
通过3D视觉系统,可以快速获取人体姿态和位置信息,生成位置限制虚拟墙,辅助人工进行远程诊疗操作。配置远程通信系统和人机交互软件,显示诊疗过程相关信息。
3.工业工件检测、打磨类应用系统原型搭建
通过3D视觉系统,可以快速获取工件姿态信息,配合AR/VR辅助系统形成虚拟操作环境,辅助人工进行远程作业。配置相关的数据采集、通信软件及人机交互软件,显示作业过程相关信息。
三、产品特色
n 平台所用机械臂可以开放底层控制,支持机械臂底层力矩、速度、位置控制,支持用户基于Simulink软件进行控制算法真机部署验证;
n 完善的二次开发环境,配置完整的机器人运动学、动力学、运动规划和力控制计算库,易于二次开发;
n 支持多种类型的主手操控设备和从手机械臂设备,机械臂法兰同样支持多种通信扩展,工具扩展和系统集成便捷;
n 支持3D视觉系统、从手机械臂末端六维力传感器;
n 支撑扩展进行 AI 数据采集与 AGI 模拟研究等方面的研究、实践任务;
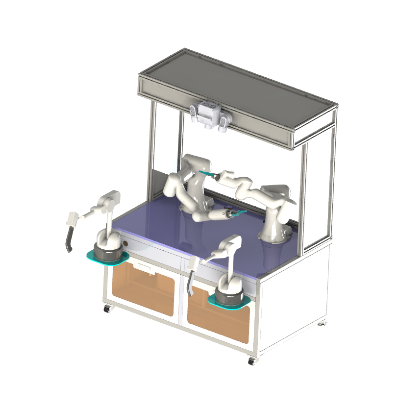
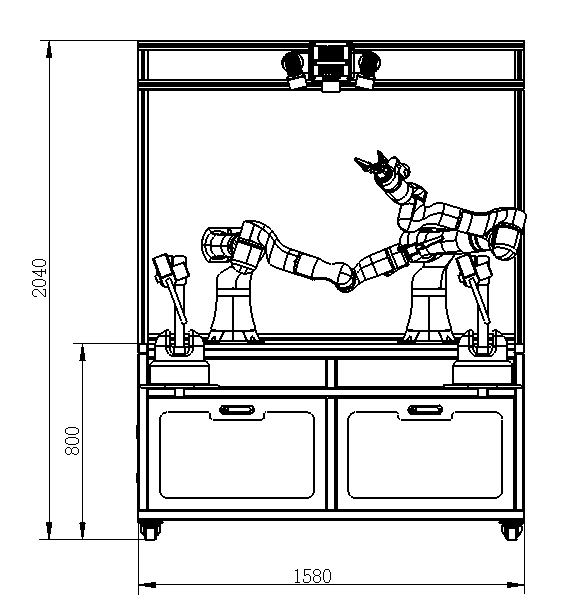
四、平台组成
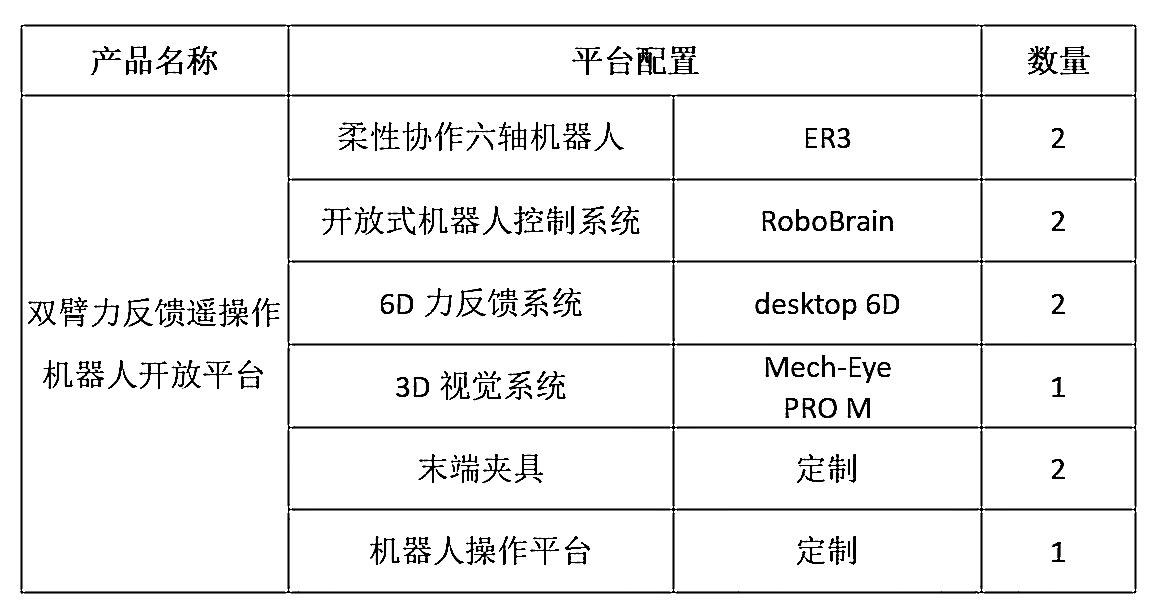
双臂力反馈遥操作机器人开放平台主要包含柔性协作六轴机器人、开放式机器人控制系统、6D力反馈系统、3D视觉系统等组成。
1、柔性协作六轴机器人
柔性协作机器人采用全关节力矩传感器配置,通过全状态反馈的直接力控制技术,避障更灵活、碰撞检测更灵敏,在兼顾位置控制高精度的同时具备高动态力控制与柔顺控制能力。


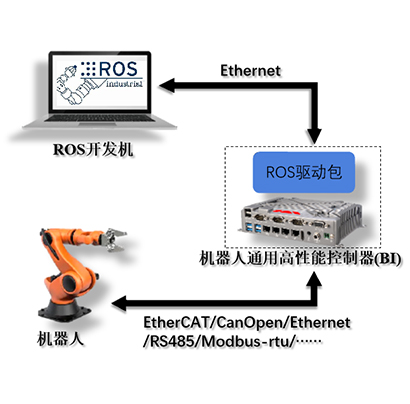
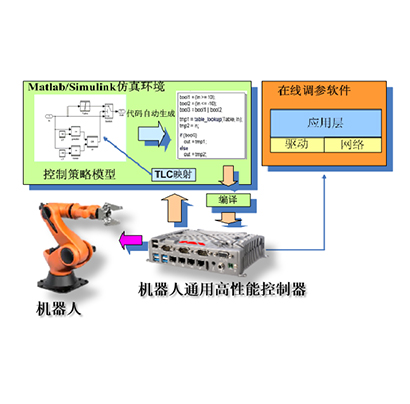
1、开放式机器人控制系统
整体:包括通信模块、运动控制模块和安全模块,实现多种构型机器人控制。可以快速搭建机器人研究或应用平台,支持机器人控制算法验证及机器人应用的快速开发。
功能:支持Matlab/Simulink下建立的动态系统数学模型应用于实时仿真、算法测试,便于全流程控制和局部算法验证。支持控制算法的纯数字仿真和硬件在环仿真与机器人真机实时控制。支持Simulink环境下的自动代码生成与部署、动态调参、参数回显等调试功能。
具有机器人基础运动库和高级动力学库、视觉库、人工智能算法库,集成多种总线通讯模块,支持快速搭建机器人教学的算法开发环境。

控制模式:位置,速度,力;
开发语言:MATLAB, C/C++;
提供完整实验工程及demo;
支持通信方式:EtherCAT,TCP/IP,UDP
开放机器人底层控制能力,包括轴力控制接口、笛卡尔力控接口、轴位置控制接口、笛卡尔位置控制、笛卡尔阻抗控制、关节阻抗控制、笛卡尔恒力控制。
提供机器人模型库,包括正逆运动学、正逆动力学模型和基础的运动控制、力控制API,支持外部高动态控制,最高通信频率1kHz,全状态反馈,包括笛卡尔空间和轴空间的位置、速度、力信息。
3、6D力反馈系统


6D力反馈系统, 为一款具有工作空间较大并在所有6自由度上提供力反馈的触觉设备,接口刷新率最高可达1K赫兹。用户使用放置在尖端处的夹持器或手柄 (称为 “末端执行器”) 来握住触觉装置。兼容市场主流力反馈公司开发工具包(兼容法国Haption驱动;可选配兼容3dsystems、CHAI3D、Unity);
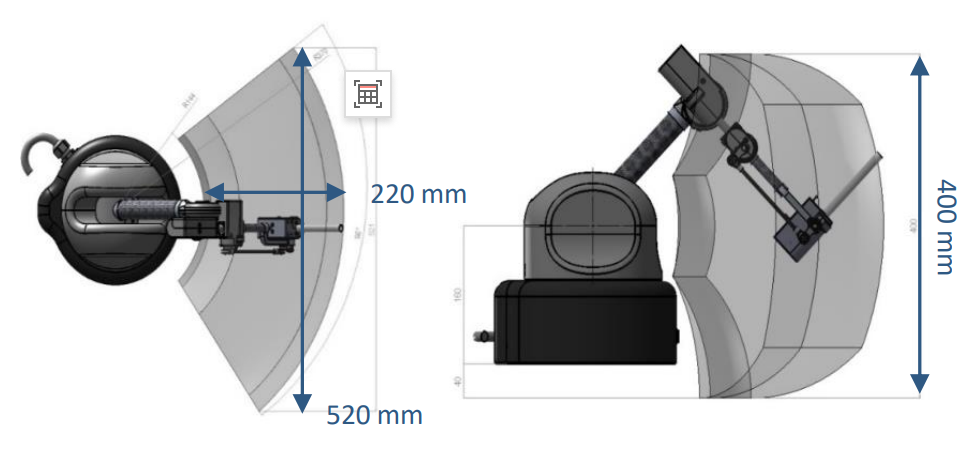
工作范围:520x 220 x 400 mm
旋转工作空间:260° x 95° x 240°
可施加力(工作区的中心):10 N (最大)/ 3 N (持续)
旋转力:0.8Nm(最大) / 0.2Nm(持续)
位置分辨率: 0.023mm
旋转分辨率:0.0023 °
设备重量: ~5KG
传输速率:1000HZ
兼容性:兼容开发工具包(兼容法国 haption驱动;可兼容3dsystems、CHAI3D、Unity、)
4、3D视觉系统
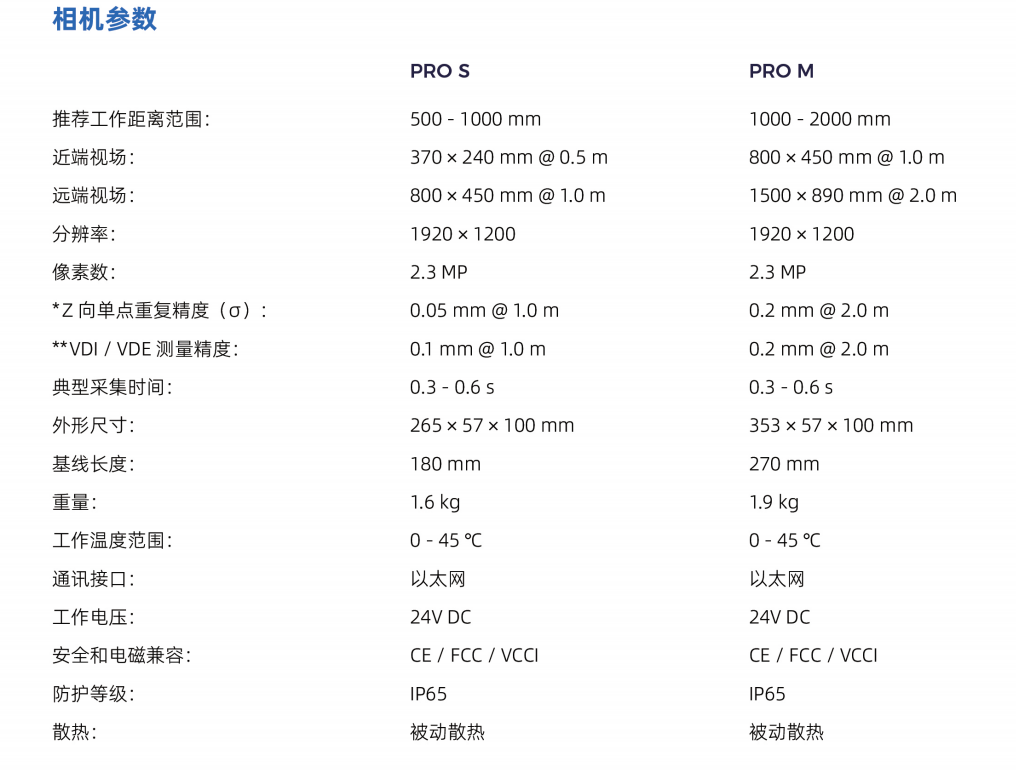
1)工业级3D相机

①智能程度高
基于先进的视觉算法,可处理各类工件以及纸箱、麻袋、货品等典型物体,轻松应对随意堆叠、无序放置、一定程度反光、暗色等复杂工况。
②稳定可靠
Mech-Eye工业级3D相机具备IP65防护等级,可在严苛的环境中稳定运行,且已通过CE、FCC、VCCI及RoHS认证。
③开放性强,部署简单高效
提供多语言、多平台的SDK选择,接口开放,部署简单。可选择搭配Mech-Vision、Mech-Viz使用,轻松、快速部署各类检测/量测应用。

2)图形化视觉处理软件
完全图形化的视觉软件,无需编写代码即可完成拆垛、无序工件上料等视觉应用。
内置3D视觉、深度学习等前沿算法模块,可满足复杂多样的应用需求。
(图形化视觉处理软件)
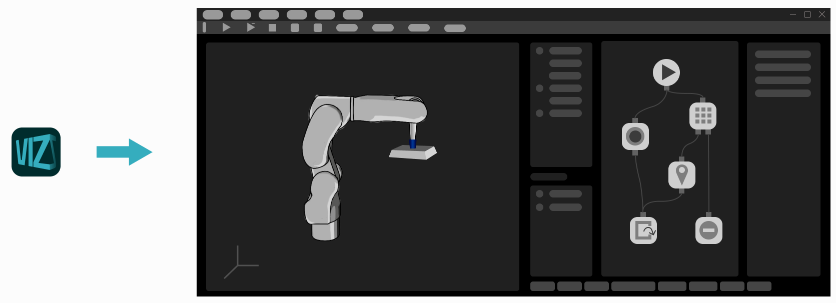
3)机器人智能编程软件
完全图形化的机器人智能编程环境,支持数字孪生。
内置轨迹规划、碰撞检测、混码等智能算法,适配国内外众多主流品牌机器人,如ABB、KUKA、FANUC、DENSO、UR、AUBO、ROKAE、JAKA等。
4)机器视觉深度学习平台软件
包括缺陷检测、分类、实例分割等功能,可对物体快速识别、定位、判断物体状态以及检测缺陷算法。
深度学习自主训练工具,将深度学习模型训练的数据采集、筛选、导入、标注、模型训练、验证及部署应用的过程进行全流程整合,方便自主操作,提升训练效率,并全程保证数据安全性。

五、平台配置清单





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1