
产品简介PRODUCT DESCRIPTION

机器人力控装配开源平台
联系电话:13720126958 / 13387619634
产品特点
PRODUCT FEATURES
1、提供机器人正逆运动学、轨迹规划、力传感器力位控制、行星齿轮装配控制算法;
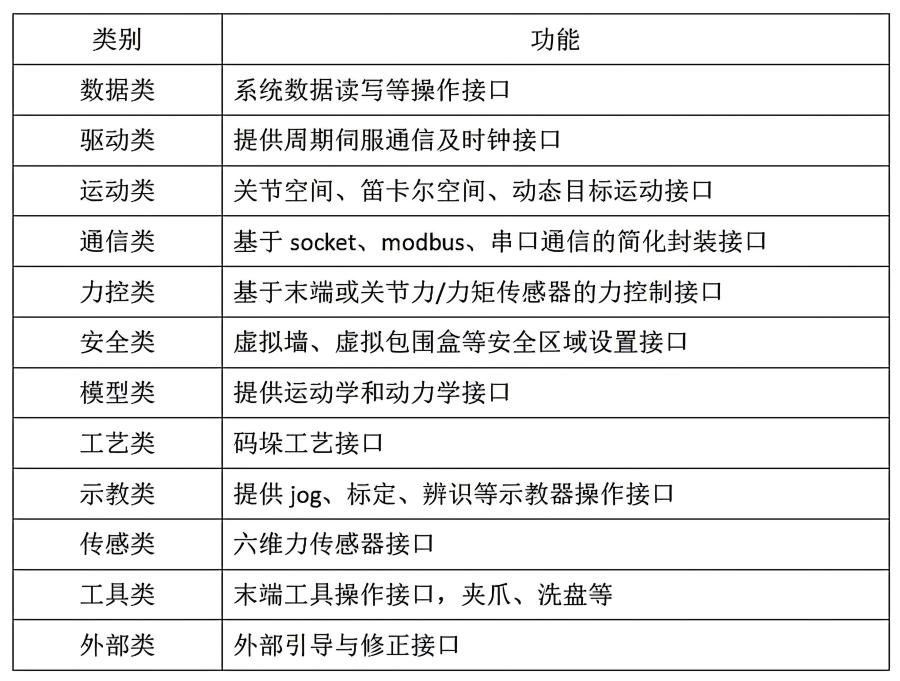
2、提供各层次c/c++二次开发接口,供用户应用或开发使用。用户可以利用这些功能接口编写应用程序,也可以利用SDK进行二次开发使用;具体接口详解。功能类别如下:
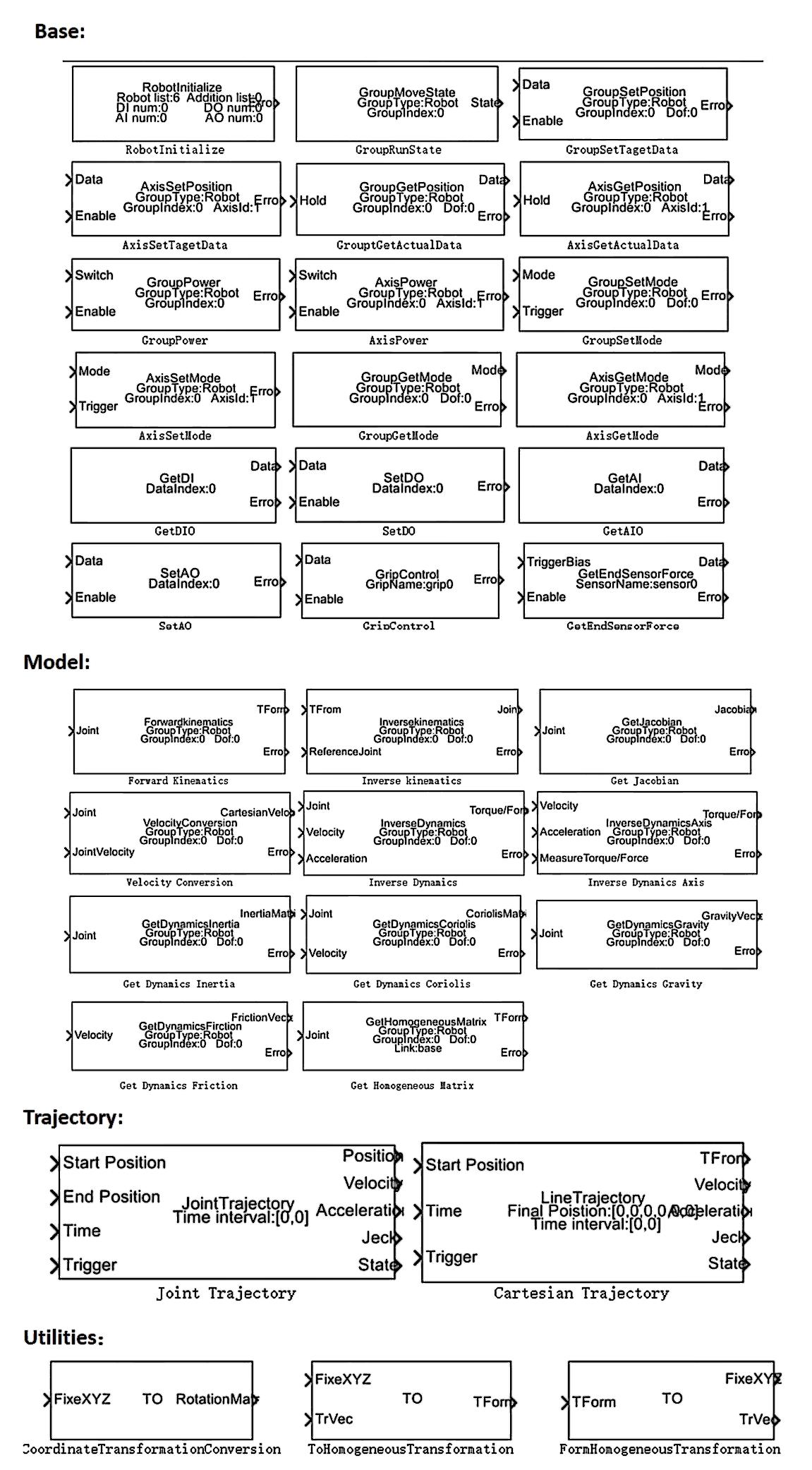
3、提供各层次matlab开发模块;
支撑的研究方向
1. 力控制技术:通过力控制技术使机器人能够适应外界环境的变化,研究机器人在工作过程中具有柔顺性。
2. 精密装配:针对精密装配中的轴孔装配问题,开发装配流程和力/位混合控制策略,实现工业机器人在高精密装配领域的应用。
3. 力位混合控制策略:研究基于伺服速度环实现的力/位混合控制策略。
4. 智能控制方法创新:探索智能控制理论的深入结合,结合神经网络、模糊逻辑控制算法等,以提高机器人在不同环境下的工作性能。
5. 智能算法应用:研究将智能算法应用于力控制领域,以求解模型中的未知参数并优化控制性能。
演示视频




客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1