

多功能救援复合机器人(履带式)
联系电话:13720126958 / 13387619634重载履带式移动机器人:
1)小车尺寸:1309x840x510 mm
2)车载PC控制系统:i7双核、储存:120G SSD固态硬盘、直流输入电压支持:12-19 VDC、USB 端口数:6个;
3)自重:160kg
4)直线运行负载:≥200kg,原地旋转负载≥150kg
6)防水等级:IP54
7)最大速度:1.5m/s
8)电机功率:2000W X 2
9)最大爬坡角度:35°
10)定制高电流,大容量磷酸铁锂电池:48V 55Ah,10A充电器
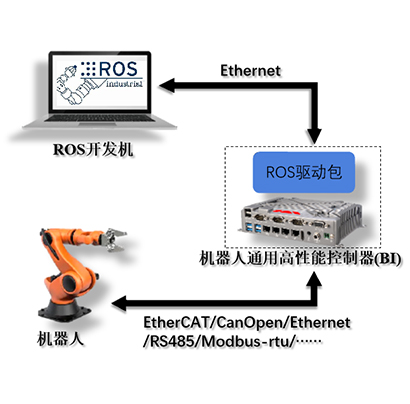
11)驱动:python/C++/Rviz/Gazebo
多线激光雷达:
1)激光线数:16线
2)测量范围:0.2~150m
3)测量精度:±2cm
4)垂直测量角度范围:30°(﹢15°到﹣15°)
5)垂直方向角度分辨率:2°
6)水平方向测量角度范围:360°
7)水平方向角度分辨率:0.09°到0.36°(5到20Hz)
差分GPS导航:
1)姿态精度: 0.2°(基线长度≥2m)
2)定位精度:单点L1/L2:1.2m,DGPS:0.4m,RTK:1cm+1ppm
3)数据更新率:100Hz
4)陀螺量程:±400 º/s
5)陀螺零偏稳定性:6°/h
6)加速度计量程:±8g
7)加速度计零偏稳定性:0.02mg
4、六轴协作机械臂:
1)最大负载:10KG
2)自由度:6
3)工作半径:1300mm
4)最大臂展:1500mm
4)精度:±0.05mm
5)IP等级:IP54
末端夹持工具:
1)手指开合行程:95 mm
2)抓持力:15-95 N
3)最快手指开合速度:190 mm/s
4)自身重量≤1 kg
5)手指重复定位精度:0.03 mm
6)通讯协议:TCP/IP, USB2.0, RS485, I/O, CAN 2.0A
双目深度视觉系统:
1)深度流输出分辨率:最高1280 x 720
2)深度流输出帧率:高达90 fps
3)最小深度距离(Min-Z):0.1米
4)RGB传感器分辨率和帧速率:920 x 1080 30 fps




客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1