
开放式桌面机器人综合科教平台
联系电话:13720126958 / 13387619634该平台是以六自由度机械臂为被控对象的教学实验系统,主要包括六轴机械臂、开放式控制系统、末端操作工具、开发pc机,能够向学生提供完整的机器人教学实验环境,包括机器人系统认识、DH建模、正逆运动学、关节空间规划、笛卡尔空间规划、雅克比矩阵、动力学等实验课程。
另外该平台还包含PLC总控单元、机器视觉系统、供料输送单元、辅助电器元件及用于检测、搬运、码垛、装配使用的功能模块。其中,PLC控制系统可用于控制机器人和机器视觉检测系统的运作,使整个系统更加智能化和高效,其使用先进的控制程序,实现复杂的运动控制和自动化任务,同时提高模拟生产效率。机器视觉检测系统可以实现对配套的工件道具进行视觉识别、检测、定位,提高检测的精度和速度。电控输送系统可以实现工件的自动上料和在皮带线上不同位置之间的运输,传送带配备了编码器,配合机器人一起使用可对物料完成空间动态跟随和抓取,提高物料的运输效率和准确性。此外,我们的实训系统还标配多款快换工具板,通过自由组合实训平台可以实现对物品的检测、标定、循迹、抓取、码垛、装配等工艺应用。
平台特点
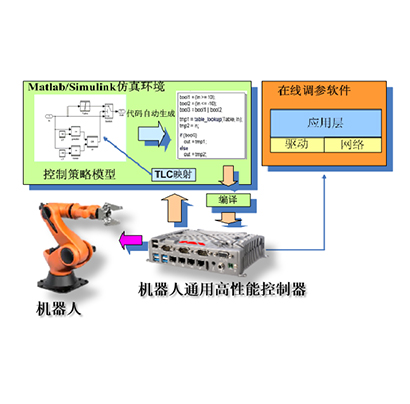
1、Matlab/Simulink下建立的动态系统数学模型应用于实时仿真、算法测试,便于全流程控制和局部算法验证。
2、高度集成的机器人编译环境保证了模型的可靠性、准确度及更小的仿真步长,提高了模型运算速度和控制精度。
3、涵盖机器人基础理论和高级控制算法库,集成多种总线通讯模块,建立运动学、动力学模型,兼具视觉、力觉等处理能力。
4、提供多层次开发接口,针对开发的深度不同,满足不同层次的开发需求,深度开放,满足定制化开发。
5、既能满足机器人学相关原理及底层控制实验,又可实现机器人系统标定、轨迹循迹,通讯控制等教学项目,结合标配的模型工件,能完成跟随、抓取、检测、搬运、码垛、精密装配等任务。
核心单元
1.六轴机械臂

产品特点:
1、安全性高:流线型机身设计结合碰撞检测功能,操作更安全,搭配圆环指示灯,实时掌握机器人的运行状况,有效降低用户碰撞风险。
2、简单安装:机身小巧,重量轻,摆放在桌面上即可启动安装,简单灵活,机器人与控制器一体化设计,免去了复杂的连线,插电即用。
3、快速上手:基于自研的轨迹复现技术,通过拖动示教,轻松完成轨迹录制,支持图形化编程,零基础快速上手,简单易用,人人可操作。
4、灵活拓展:支持 ROS, Matlab、Labview、C++ 等控制方式,丰富的开发接口支持二次开发,适配吸盘、夹爪、滑轨等工业级生态组件,应用场景灵活扩展。
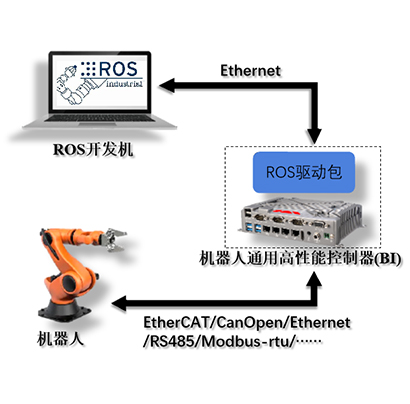
2.开放式控制系统

开放式控制系统可以实现多种构型机器人控制。支持用户快速搭建机器人研究或应用平台,支持机器人控制算法验证及机器人应用的快速开发。
特征优势:
l 统一的操作接口、仅需要简单的配置即可实现快速适配;
l 支持多机器人协同作业;
l 运动控制支持CIA402协议,支持通用构型的运动控制;
l 安全模块包括支持分布式时钟、支持冗余、支持热插拔和支持运动状态检测等。
机器人模型库:
l 机器人单轴控制库
l 机器人接口库
l 机器人基础控制库
l 机器人3D显示库
l 传感器接口库
l 末端执行器接口库

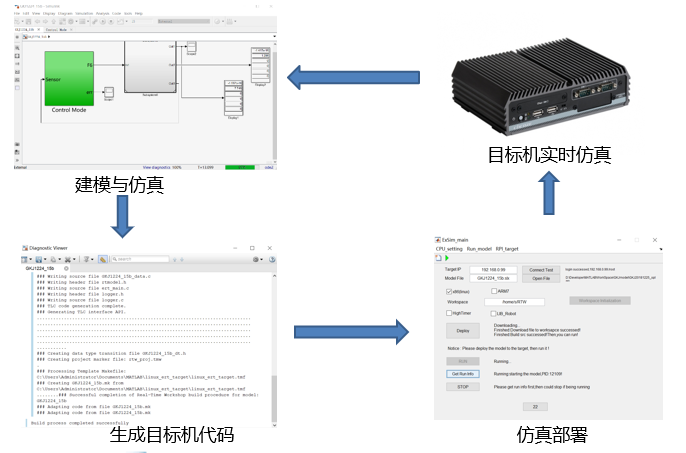
机器人软件开发工具:
机器人应用开发工具(CPS Builder)实现机器人控制系统的模型搭建,快速仿真测试。


l 开发流程
1. 数字仿真。在Simulink中建立机器人控制模型,初步验证模型及算法;
2. 半实物模型准备。对数字仿真模型进行修改,建立半实物仿真模型;
3. 目标代码自动生成。将Simulink模型转化为C代码,并最终编译为可执行程序;
4. 仿真配置管理。配置仿真目标机属性;
5. 实时仿真。连接目标机成功后,启动实时仿真。可执行文件自动运行,与实际机器人系统或HIL交互;开发工具支持在线调参,启停控制,实时数据存储等功能;
6. 仿真数据分析处理。
3.视觉单元
视觉软硬件平台具有功能丰富、性能稳定、操作简便的优势,能够满足视觉定位、测量、检测和识别等丰富的视觉应用需求。系统自带千余种图像处理算子,算法性能优秀,具备强大的视觉分析工具库,可快速构建机器视觉应用系统,满足不同的实验项目和应用需求。

4.总控单元
总控单元配备了西门子S7-1200PLC以及拓展I/0模块和HMI触摸屏。其中核心部件PLC(可编程逻辑控制器)为一种具有微处理器的用于自动化控制的数字运算控制器,可以将控制指令随时载入内存进行储存与执行。可编程控制器由CPU、指令及数据内存、输入/输出接口、电源、数字模拟转换等功能单元组成。通过HMI可实现对总控系统的快速调试及控制,大大提高了设备的应用效率及准确性。

5.迷你气泵盒
相较于传统供气方式噪音大、体积大、成本高,此款气泵盒为客户提供了一种更便捷、简单的供气和使用方式。气泵盒可以提供-70~110kpa的气压范围,其外观设计精巧,便于可通过I/O控制接口直接和机器人适配,即插即用,并可适用于日常大多数的吸盘和柔性夹爪应用场景。

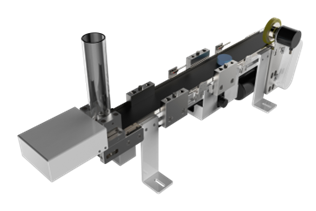
6.供料传输单元
主要用于将物料从料仓推送至皮带线上,以实现物料在不同位置之间的运输。该传送带采用内置步进电机,可以准确控制物料的推动距离和速度。通过直流减速电机驱动,可控制皮带线的转速,以适应不同物料的运输需求。此外,该传送带还配备了多个对射传感器和编码器,可以准确检测物料在皮带线上的位置,并实现机器人对物料的空间动态跟随和抓取,提高物料的运输效率和准确性。
7.快换板单元
实训台标配4个快换板模块,包含:轨迹板、标准视觉载物板、手机模型工件载物板、圆形/矩形工件载物板。配合机器人执行单元和视觉单元可完成对实验对象的视觉识别、检测、定位,同时实现对物品循迹、定位抓取、码垛、装配等工艺应用。实训台配置有通用的固定接口,方便根据客户定制化需求拓展、增配快换工具板,以满足更多的实验场景。

8.工具盒单元
工具盒单元可将实训台零配件及工具统一整理收纳,定制的内衬模具有效地保护好每个配件安全存放,不受运输等外力影响。工具箱内包含:实验对象工件、工具、机器人末端转接板、标定针、吸盘、螺丝、接头备件等。

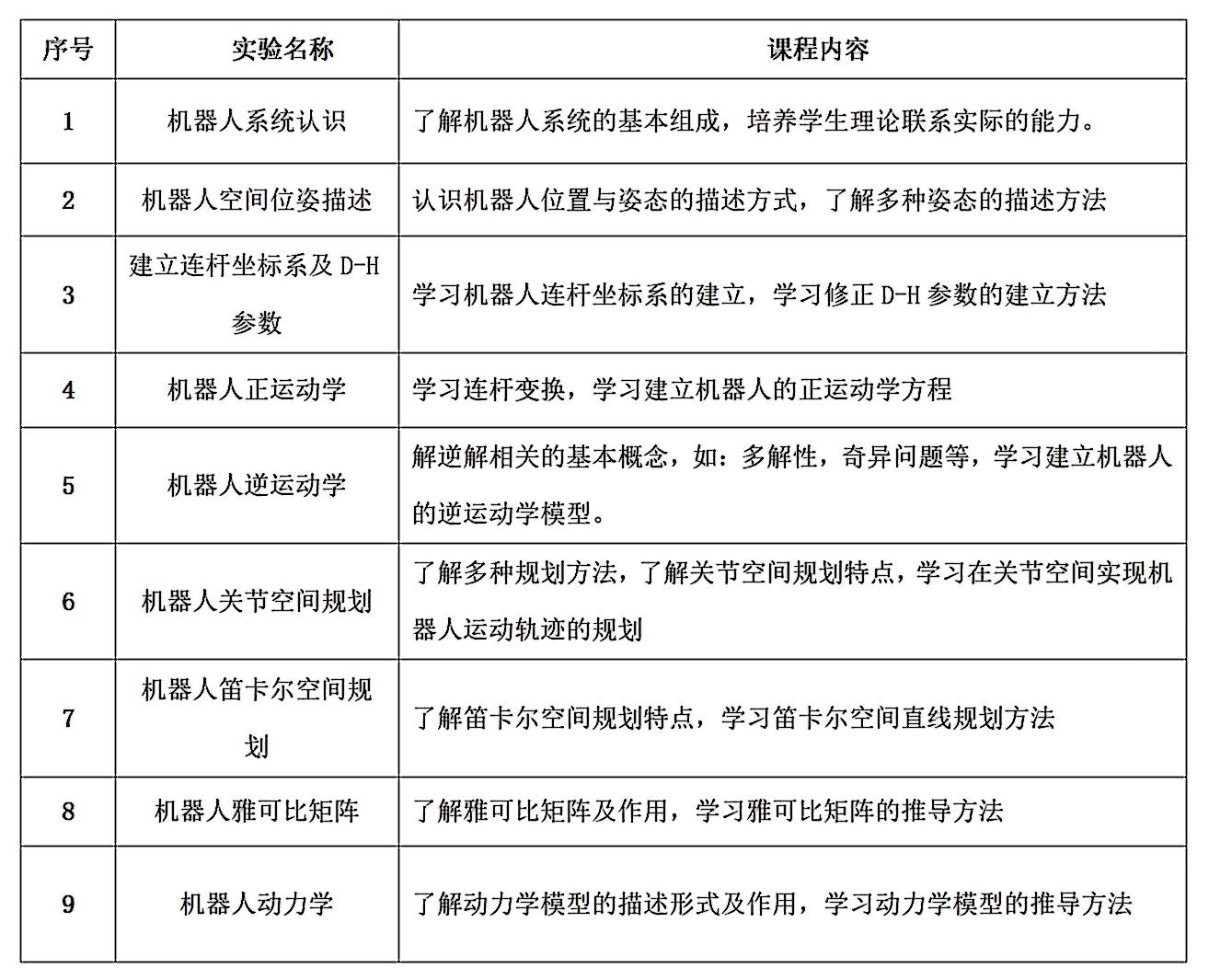
配套实验内容
机器人学相关实验:
机器人实训实验:






客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1