
快速原型开发系统
联系电话:13720126958 / 13387619634产品特色
PRODUCT FEATURES
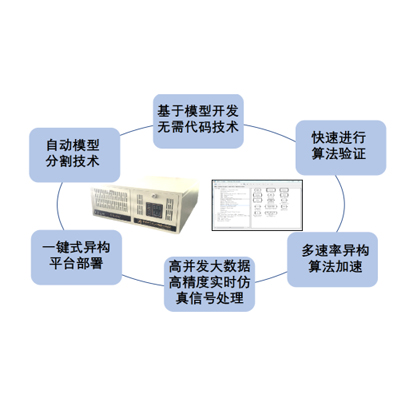
1、支持RCP快速原型设计, 实现用户从Simulink模型开发到异构硬件平台的自动转换,用户无需懂得代码编程技术,无需考虑硬件平台调试、驱动开发等问题,专心把精力投入算法中,能快速的实现算法验证。
2、支持HIL硬件在回路测试,加速产品的开发速度,模拟被控对象能降低用户的搭建系统成本,测试速度更快、效率更高、实验更安全。
3、采用实时Linux操作系统,多核处理器方便多任务处理,同时,实现自动模型分割技术,可以让算法分核运行到不同的CPU中,合理的划分算法与系统任务。
4、支持CPU+FPGA异构平台自动代码生成及部署功能,同时,支持异构平台间的数据回显和在线调参。
5、IO资源支持广泛,拥有高速同步AD、同步IO、RS232、增量/绝对值编码器、PWM驱动、Ethercat从站、CAN、USB等接口。单功能卡、多功能卡、多路AD/DA驱动卡、子系统卡、可编程功能卡等多种选择,用户可以灵活组合。
6、可广泛应用于伺服驱动产品及电机控制快速原型教学平台、精密运动控制等领域。
案例介绍
CASE INTRODUCED
1、光刻机仿真平台
1)系统组成:
光刻机仿真平台主要由硬件在环实时仿真机、控制器和实时通信总线三大部分组成。硬件在环实时仿真机也被称作HIL(Hardware in the loop),它的作用为实时接收来自控制器的控制指令,模拟仿真光刻机各个子系统运行参数,并通过实时通信总线将状态数据反馈给控制器。在线硬件在环实时仿真机内部包含通讯驱动模块以及光刻机各个子系统的仿真模型。
2)功能简介:
光刻机控制属于高精密运动控制范畴,对系统实时性要求极高,因此本系统中硬件在环实时仿真机和光刻机控制器全部采用实时化操作系统,并依靠异构的部署功能,将计算复杂并行度高的算法部分部署到FPGA中运行,通过CPU+FPGA架构,目前系统控制频率可达20KHz。
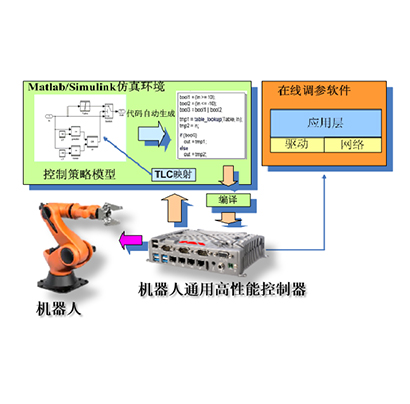
硬件在环实时仿真机为用户提供了算法模块库和光刻机模型搭建环境。算法模块库可以辅助用户搭建光刻机仿真模型,用户可自行调整光刻机仿真模型运行参数。控制器为用户提供了算法模块库、硬件控制模块库及控制模型开发环境,算法模块库辅助用户快速搭建自己想要的控制算法,硬件模块库中的各个模块对应控制输入输出板卡中各个硬件模块,具备硬件参数配置、在线信号下发采集和数据监视等功能。控制器还为用户提供FPGA异构加速板卡,用户可以将复杂及重复性的计算算法下派到异构计算板卡中运行。
3)实验结果:
控制周期20Khz测试:在VPX FPGA中严格按照50us同时触发VPX控制和HIL,通信和模型计算完成后,在FPGA中监控返回信号,检测控制时间始终保持在50us以内。


控制模型算法验证,上图2所示为控制算法给出的期望方波以及仿真机返回的实际波形,由图中可见仿真波形与实际波形几乎完全重合。
2、高精密运动控制平台
1)系统组成:
本系统由上位开发机、实时控制主机、 FPGA IO板卡、自研功率放大模块、商业驱动器和机械控制对像组成。其中机械对像可以是伺服电机、多自由度高精度XYR运动平台、尺蠖式压电致动器等。
2)功能简介:
针对光刻机、光学系统、微机电系统等领域,应用自有模型化控制算法开发环境,搭配多路多信号IO板卡做为电量采集手段,高性能功放实现功率驱动,典型运动机构做为控制对像。为高精密运动控制系统开发人员、研学人员,提供一套算法验证平台。在本台上可以跳过基础编码器采集、驱动软件开发等工作,直接验证高级控制算法。由于软变量全开放性,硬件系统自研,所以可以为算法开发人员提供有力的支撑。
3)实验结果:






客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1