
产品简介PRODUCT DESCRIPTION
水下移动机器人教学科研平台
联系电话:13720126958 / 13387619634产品特色
PRODUCT FEATURES
EDUROV可用于高校工程训练、机器人创新实验室、控制算法实现、视觉算法实现等多种教育研发领域,备有适合不同领域和层次用户使用的课程教案和实验指导书。面向应用,强调高校教育和研究。
EDUROV的传感器模块、控制计算机、电源、推进器、执行器等均有适应不同应用领域的配置可互换。无论是着重于视觉方面的图像算法研究,还是聚焦于运动的控制算法研究,总会有满足需求的执行器、传感器配置。
EDUROV配备有完整的基于ROS平台的软件包。集成了包括机器人行为规划、导航、视觉、自主策略的完全开放软件平台。同时,基于开放性,扩展性的原则,用户可以亲自对软件包进行调试与开发,我们将提供完整的开发手册。
为了方便上手和教学需要,EDUROV还提供一整套仿真软件。在实际接触实物机器人前,对整体实验、机器人结构进行熟悉,以提高实验成功率和效果。仿真平台可提供的实验包括模型搭建、机器人本体自稳控制、路径规划等。
硬件组成
HARDWARE COMPOSITION
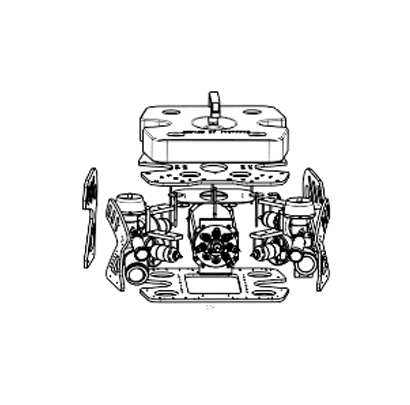
本项目所研制的教学版水下机器人分为水面系统和水下系统两部分。水面系统负责图像显示,人机交互界面显示,与水下系统、遥控器的通信。水下系统负责机器人运动控制,机械手操作控制,环境与运行状态数据采集,摄像头与声纳图像采集,与上位机通信。

图2 教学版水下机器人总体结构图
系统结构图如下所示:

图2 教学版水下机器人系统结构图
- 载体结构
水下系统采用框架式机械结构,推进器和浮力材固定在框架上,电子设备和摄像头封装在一个电子舱内,机械手和水声通信机固定在框架和浮力材上,通过水密接插件与水下电子舱相连。
- 通信系统
水下机器人水面与水下通信包括:水声通信和脐带通信。
(1)水声通信机要求: 通信接口:串口; 供电电压:16V。 (2)脐带通信可提供系统水面与水下的有线网络连接。
- 航行控制系统
航行控制计算机完成水下机器人的运动控制与应急,运动控制分为两种模式,一种为水面遥控模式,此时水下机器人可通过水下控制计算机和遥控手柄操控水下载体上的推进器和其他设备。另一种是自主模式,在自主模式下,水下机器人可完成定向航行和定深航行。自主航行参数包括航向角设定值,航行深度设定值、航行时间等。
- 能源系统
水下机器人采用锂电池供电,容量为:240wh,平台电压:12V。
- 水面控制
水面控制台包括水面控制计算机、水面网络通信设备,水面供电设备等。具体参考界面如下:

软件特点
SOFTWARE FEATURES
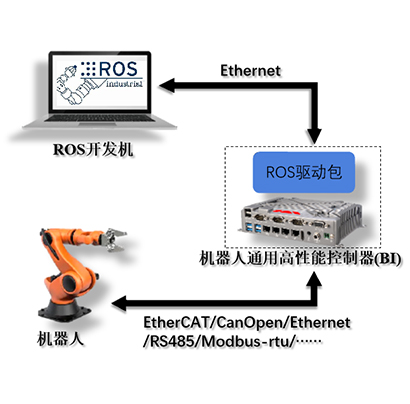
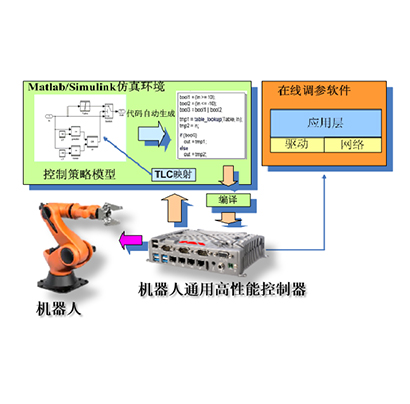
(1)基于ROS平台开发的软件
ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。它提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。
ROS控制框架如图二所示。

图二 ROS控制框架
以这种框架设计的软件有其下特点:
1)所有包通过上位机进行调用实现人机交互,ROS下可以直接创建Qt界面包。
2)串口数据模块根据固定的格式和串口通信达到和ROV交互信息的功能。
3)由解析接收的串口数据可以得到ROV的当前姿态信息、加速度信息等,由解析发出的信息可对ROV发送控制信号。
4)实现子功能只需编写对应的APP包实现,达到解耦合的效果,每个程序间相对独立
5)组合调用子功能可以实现相应的高级功能,可以将高级功能命令编写成脚本
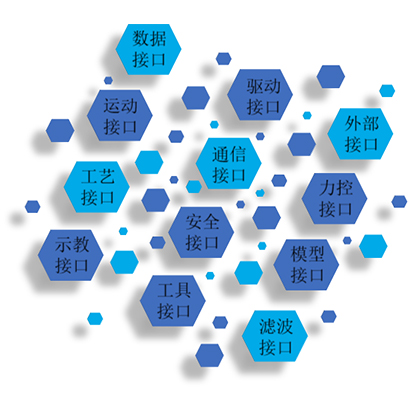
其功能模块包括:
1. 运动控制功能模块
2. 传感器感知功能模块
3. 仿真功能模块
包括的子模块详细框图见图四。

图四EDUROV功能模块
(2)水下图像处理算法
水下机器人主要的环境感知手段是图像,但是由于水体会对水下图像产生严重的弱化现象,且一些水下物体存在着可变形的特点,从而严重影响水下机器人检测识别能力。 因此本产品提供基于EDUROV视觉成像系统的水下图像处理算法实现平台。EDUROV将摄像头采集到的图像数据传到上位机,上位机运行水下图像处理算法对采集到的图像进行图像增强、目标定位等功能实现。 本产品提供软件接口给用户直接对图像进行处理。用户可以根据自己需要进行开发和修改。
(3)全套仿真软件
EDUROV-simulator是与EDUROV配套的,专门用于ROV的一套开发和仿真系统。它包含一个计算机软件包,使用不同工作模式对ROV进行仿真。通过Gazebo软件可以非常直观的看到自己亲手设计的ROV与周边环境交互。同时,通过Rviz软件可以非常细节的看到ROV运动姿态、仿真参数,便于用户接下来的分析和改进。ROV在水底仿真示意图如图五。

图五仿真软件中ROV在海底展示
Rviz细节观察参数界面如图六所示。

图六Rviz中界面与轨迹规划展示
界面介绍如下:
1)ROV状态监控栏
这部分展示了ROV所处的运行状态。包括俯仰角,参考点距离,参考点等信息。
2)Rviz仿真状态栏
展示仿真运行时的节点、模型、tf等。
3)ROV摄像头成像仿真
仿真中模拟的摄像头成像。图像为之前建的seabed河床图。
4)ROV仿真主画面
展示ROV与海底背景的主画面。紫色为预先设定的轨迹。只要载入预编的.yaml文件,向节点输入目标点、速度即可使ROV沿着设定路径前进。为后面做路径规划做基础。
5)仿真时间信息
仿真软件包括的功能有:
搭建属于自己的水下ROV模型
通过点云等源文件构建海底模型
ROV水下姿态控制
ROV水下路径规划
干扰下的ROV控制
4)机器学习框架
为了满足日益增长的机器学习需要,本产品在上位机提供机器学习框架。
研究项目
RESEARCH PROJECT
(1)水下机器人传感与感知技术
传感器主要包括:声呐、电子罗盘、陀螺仪、GPS、摄像头、深度传感器等多种传感器。可完成的实验研究包括:
基于声呐的环境建模
基于GPS和电子罗盘的机器人区域导航定位研究
基于深度传感器的定高定深控制研究
基于水下摄像头的视觉获取(2)智能系统及其控制算法
本产品配有四个水下推进器,使用通过电子调速器控制其推力。基于EDUROV的水下机器人平台,可以在真正的水下平台上研究动态复杂环境下水下机器人的控制。同时结合视觉、陀螺仪、深度传感器等传感器信息,可精确控制水下机器人的运动。结合仿真软件,可以完成理论à仿真à实验验证的研究流程,进行相关算法的验证,可开展的研究领域包括:
基于PID控制的机器人运动控制研究
水下机器人的动力学、运动学建模
机器人系统中的嵌入式控制器研究(基于stm32处理器)
基于遗传算法的水下机器人智能控制和路径规划研究
(3)机器视觉技术
水下视觉对于水下机器人作业非常重要。EDUROV包括标准配置的单目摄像头以及可选配的双目立体视觉摄像头,可开展与计算机视觉相关的研究有:
水下图像传输与解码
基于机器视觉的视觉导航系统研究
图像特征与模板匹配技术研究
基于视觉的三维环境重建研究
视觉伺服技术机器控制系统研究
(4)水下机器人仿真
仿真软件可以在接触实物前提前了解算法和硬件模型,做到心中有数,大大降低了教学研究的上手难度,同时也提高了学习的有效率。本产品提供的仿真功能有:
真实六自由度仿真
允许用户指定载体组件位置和性能
加入环境影响因素,包括抄袭和海况
模拟输入和输出
数据记录和回放
路径规划
羽流模拟





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋08层801
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1