
产品简介PRODUCT DESCRIPTION

双臂协作机器人开发平台
联系电话:13720126958 / 13387619634双臂协作机器人开发平台,主要由两台六轴协作机器人、电动手爪、2D或3D视觉系统、主控电脑和实训机台等组成,并可以选配六维力传感器或人机语音组件等。可以通过运动规划、干涉区域设置以及传感器控制用于仿人臂智能协作控制实验;也可以通过双臂运动规划和力反馈完成复杂程度高的协作装配或加工;还可以用于基于机器学习能力的双臂机器人任务等,通过意图编程模式替代动作过程编程方式。机器人本体、手爪、视觉、交互方式、场景均可以根据用户需要定制。
主要展示内容:
1,产品识别(颜色、图案、轮廓(2D或3D))
2,双协作机器人协同控制
3,双臂协作七巧板拼图
4,双臂协作三阶魔方还原
5,双臂协作螺丝&螺母装配
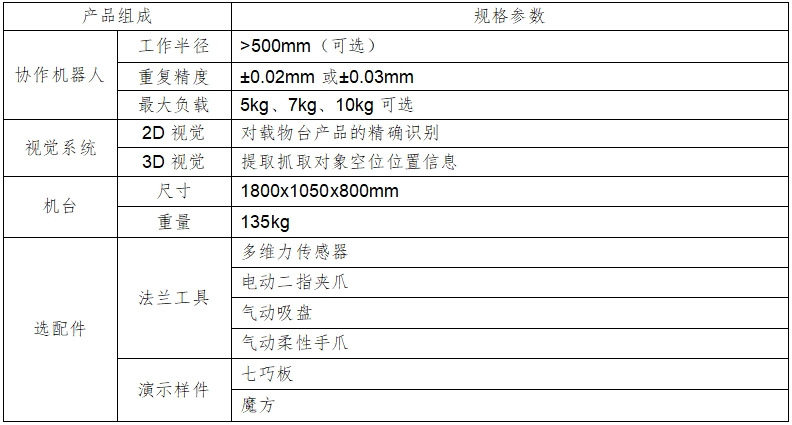
备注:机器人品牌、臂展、负载和功能模块均可以根据用户需要选择。





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1