
产品简介PRODUCT DESCRIPTION

机器人负载晃动抑制规划开源平台
联系电话:13720126958 / 13387619634产品特点
1、提供机器人运动学及动力学代码
2、提供倒立摆控制代码
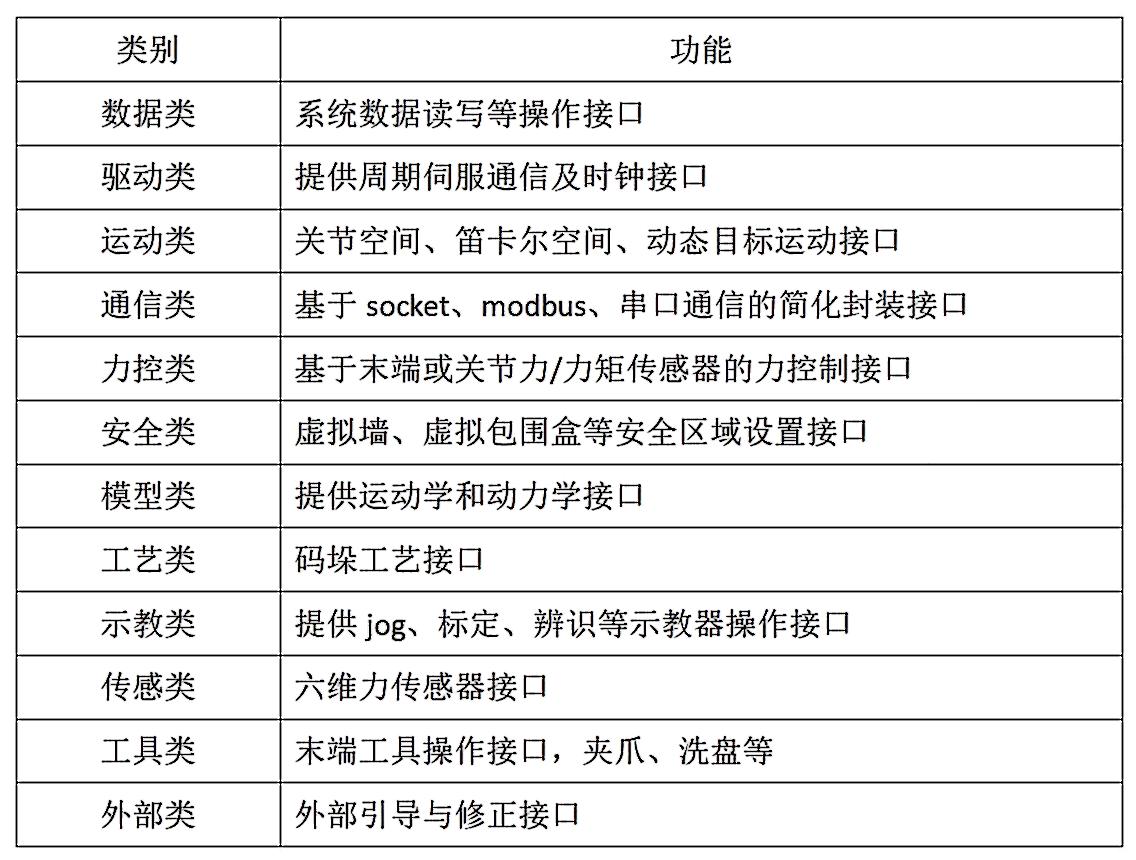
3、提供各层次c/c++二次开发接口:
提供了多类功能接口,供用户应用或开发使用。用户可以利用这些功能接口编写应用程序,也可以利用SDK进行二次开发使用。具体接口详解。功能类别如下:
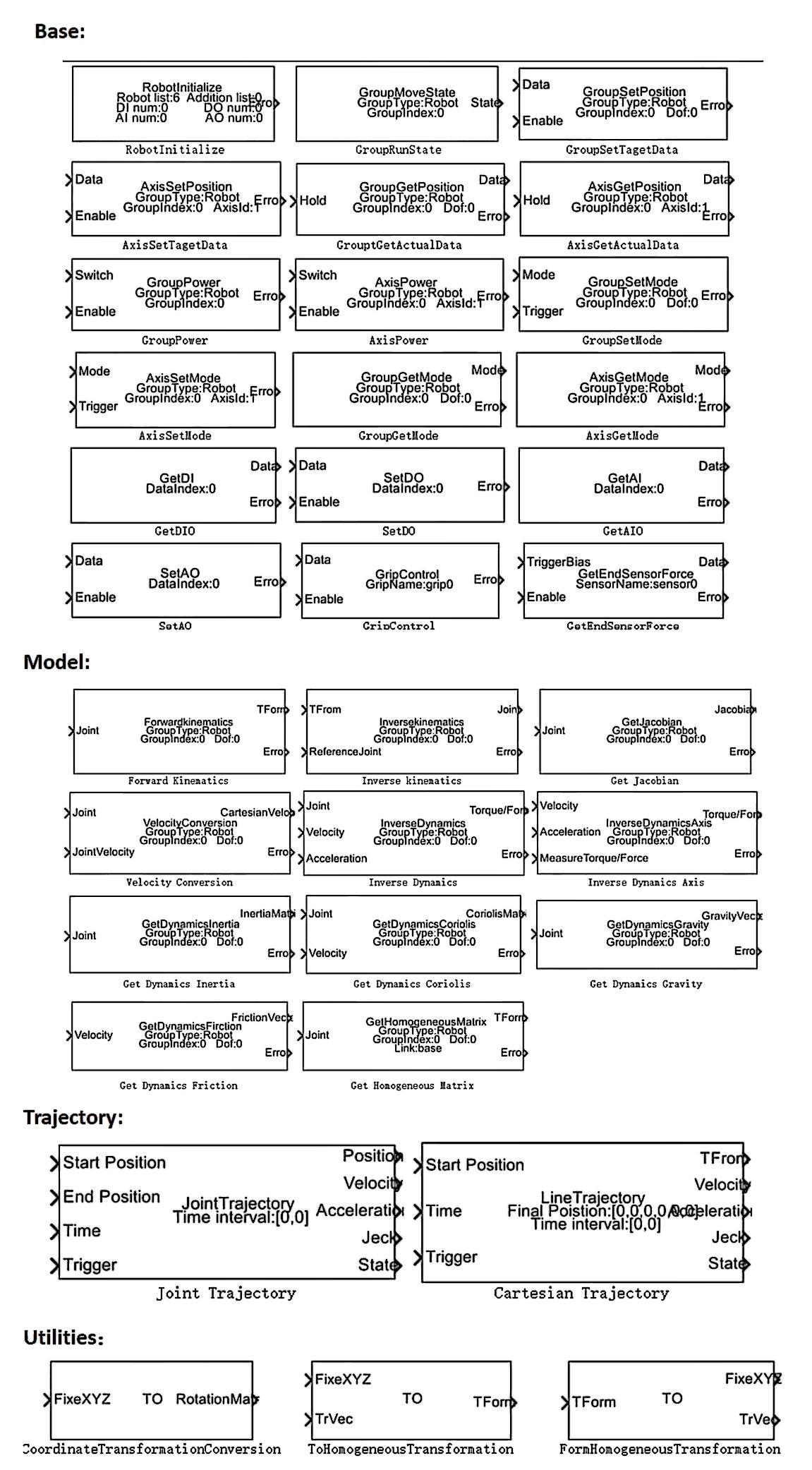
4、提供各层次matlab开发模块:
支持的研究方向:
1、机械臂倒立摆系统的动力学分析方法研究:研究多轴机械臂与倒立摆的一体化动力分析方法。
2、机械臂倒立摆一体化现代控制理论研究:针对机械臂倒立摆系统的非线性特性和不确定性模型,开展滑模控制、自适应控制等方法研究。
3、机械臂倒立摆一体化智能学习控制方法研究:开发基于机器学习和人工智能的智能控制算法,如神经网络和深度学习,以提高机械臂倒立摆系统的自适应性和鲁棒性。





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1