

工业具身智能双臂训练平台
联系电话:13720126958 / 13387619634产品核心优势
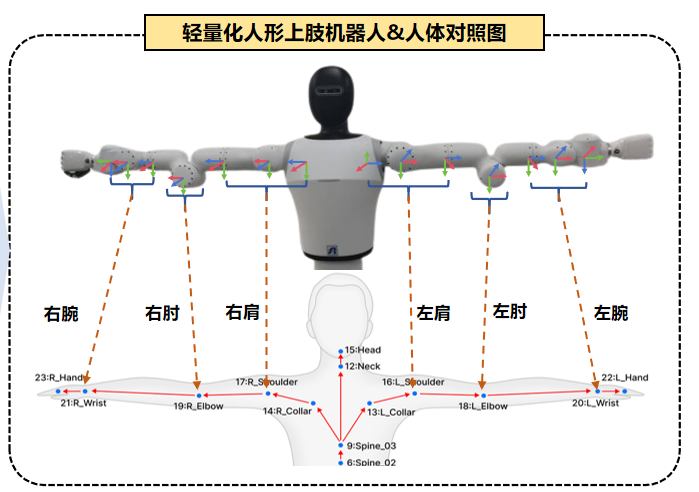
1. 硬件性能卓越,适配工业复杂操作:搭载高精度轻量化人形上肢双臂硬件,具备多自由度、高采样频率、高精度定位等特性,兼顾高刚度与灵巧度,可完成精细化工业操作,满足工业场景对作业精度、负载能力、运动灵活性的核心需求。
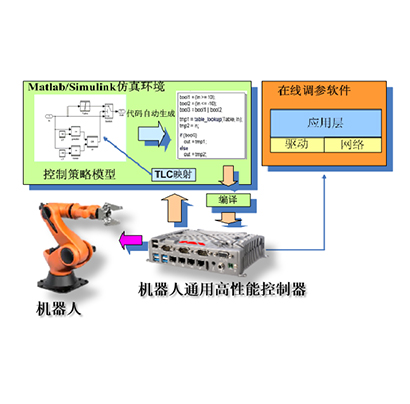
2. 虚拟仿真训练,破解数据与训练难题:深度集成 FEden 工厂级具身智能训练仿真平台,通过高保真 3D 虚拟工厂构建、多源数据采集与合成、无代码化模型训练,解决工业场景真实数据获取难、模型训练周期长、开发专业门槛高的行业痛点,实现机器人模型的快速训练与验证。
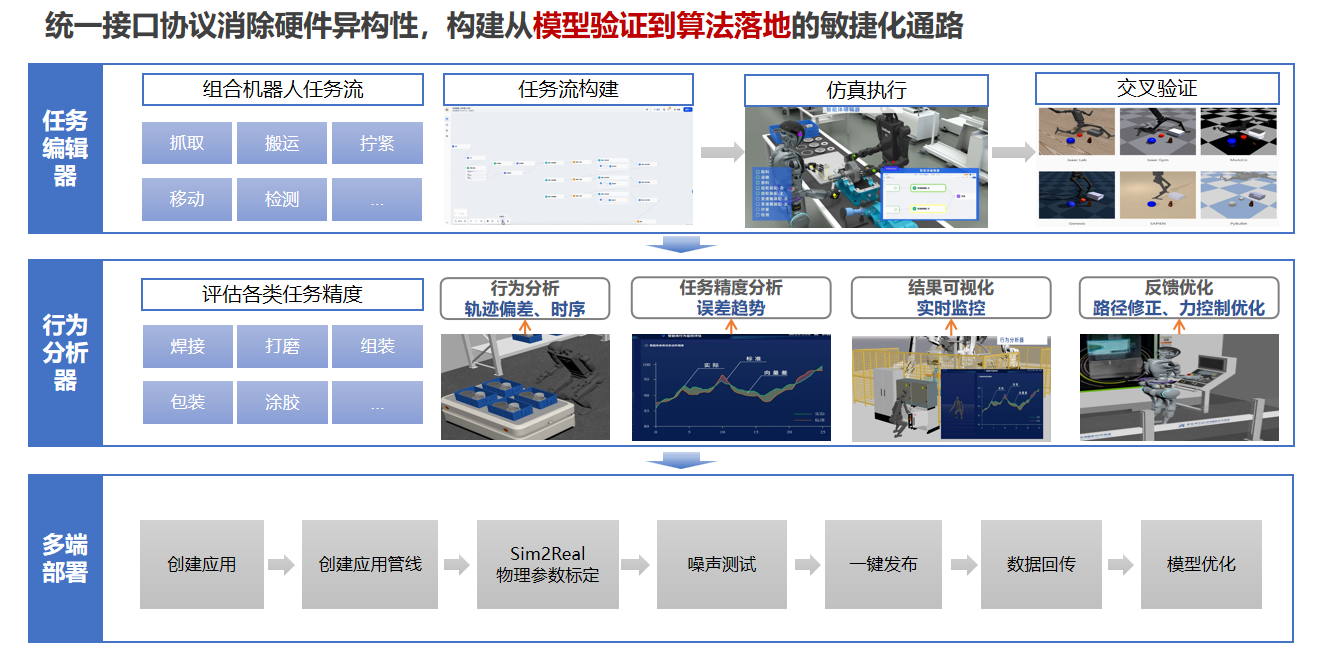
3. 端侧仿真协同,全链路高效落地:构建 “虚拟仿真 - 模型训练 - 验证优化 - 真机部署” 的全流程开发体系,Sim2Real 跨域验证保障虚拟训练模型向真机的高效迁移,统一接口协议消除硬件异构性,实现模型快速上线与作业落地,大幅缩短工业机器人开发与应用周期。
4. 具身智能驱动,自适应复杂场景:融合具身智能 “大小脑” 协同架构,具身大脑实现任务规划、语义理解与推理决策,具身小脑完成精准运动控制与工艺操作,实现 “环境感知 - 推理决策 - 运动规划 - 动作执行” 的闭环智能链路,可自主适应工业场景的动态变化。
产品核心组成
本产品由高精度轻量化人形上肢双臂硬件系统与FEden 工厂级具身智能训练仿真平台两大核心部分组成,二者深度耦合、协同运行,实现硬件作业能力与智能训练能力的一体化融合。
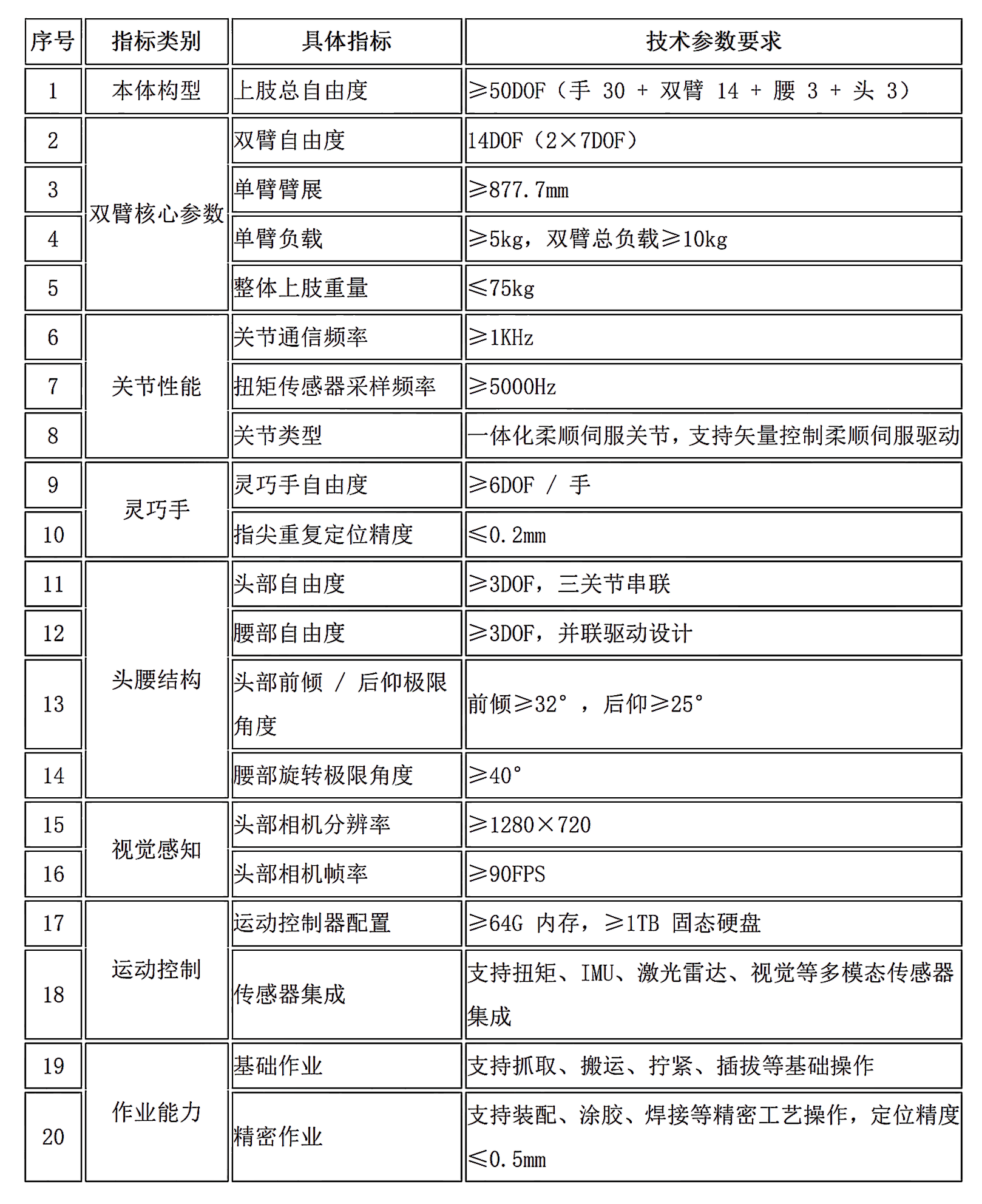
1. 硬件系统:采用仿人上肢构型设计的轻量化双臂硬件,包含双臂本体、灵巧手、多模态传感器(扭矩传感器、相机、IMU 等)、运动控制器等核心部件,具备多自由度、高采样频率、高精度定位、大负载等特性,同时配套头腰协同结构,提升整体作业灵活性。
双臂硬件系统技术参数
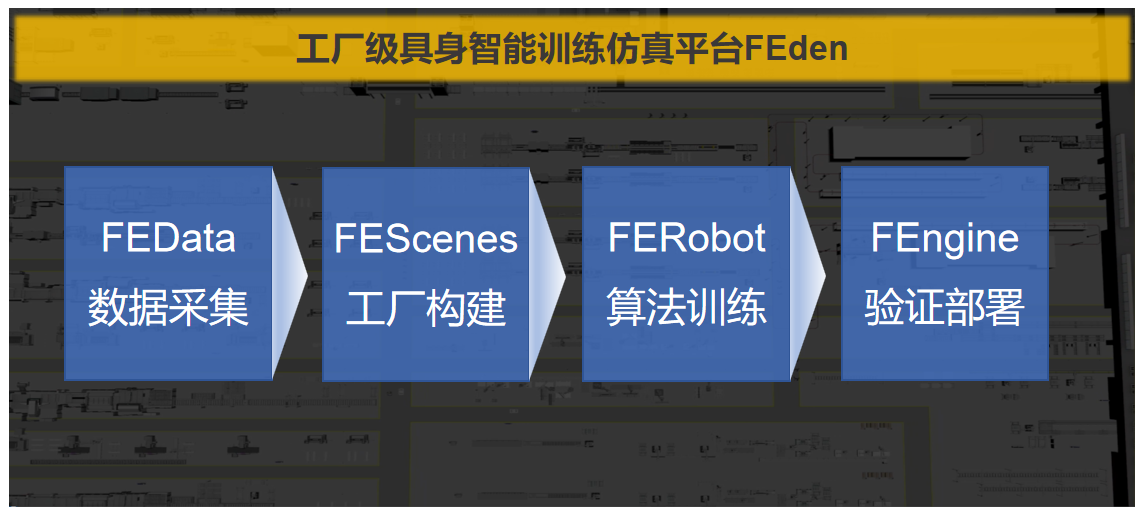
2. FEden 仿真训练平台:国内首个工厂级具身智能训练道场,涵盖 FEData 数据服务、FEScenes3D 工厂建模、FERobot 具身大小脑训练、FEngine 验证部署四大核心模块,提供数据采集 / 标注 / 增强、3D 高保真场景搭建、具身智能算法训练、模型验证与一键部署等全链路能力。
2.1核心技术优势
1) 高精度 3D 工厂仿真建模:拥有统一模型标准格式,搭建海量工厂、设备、零部件模型库(1000 + 专机模型、50000 + 零部件,0.1mm 级精度),支持 100 + 工艺场景(搬运、焊接、装配、打磨等),拖拽式场景搭建,快速还原工业真实环境。
2) 全类型算法训练能力:覆盖传统机械臂与具身机器人全算法体系,支持感知算法、传统控制算法,以及基于 AI 的强化学习 / 模仿学习 / 具身大模型(VLA)训练,实现具身智能 “大小脑” 协同训练,适配工业多场景任务需求。
3) 多源高精度数据采集与处理:支持仿真数据合成、标注、增强,融合真机 / 动捕 / 遥操作多类型数据,打造一站式数据中枢,破解制造业训练数据匮乏难题,数据质量与规模双重保障。
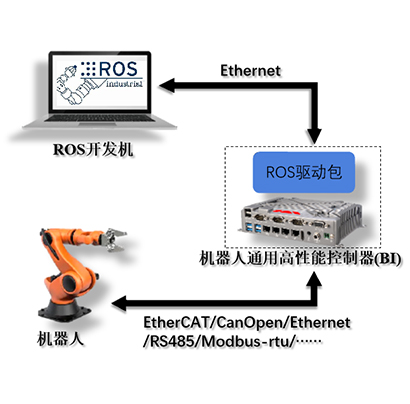
4) 一键式快速部署与虚实融合:基于 ROS2 打通 Sim2Real 无缝迁移,统一接口协议消除硬件异构性,支持多端部署与交叉验证,实现模型从仿真验证到真机落地的敏捷化通路,大幅缩短上线周期。
5) 低代码 / 无代码开发体验:构建可视化无代码 “仿、采、训、推” 开发流程,降低专业学习与开发成本,非核心环节耗时大幅减少,开发周期缩短 2-3 周,适配工业企业技术团队高效开发需求。
2.2核心功能模块
FEden 由四大核心模块构成完整技术链路,实现全流程闭环:
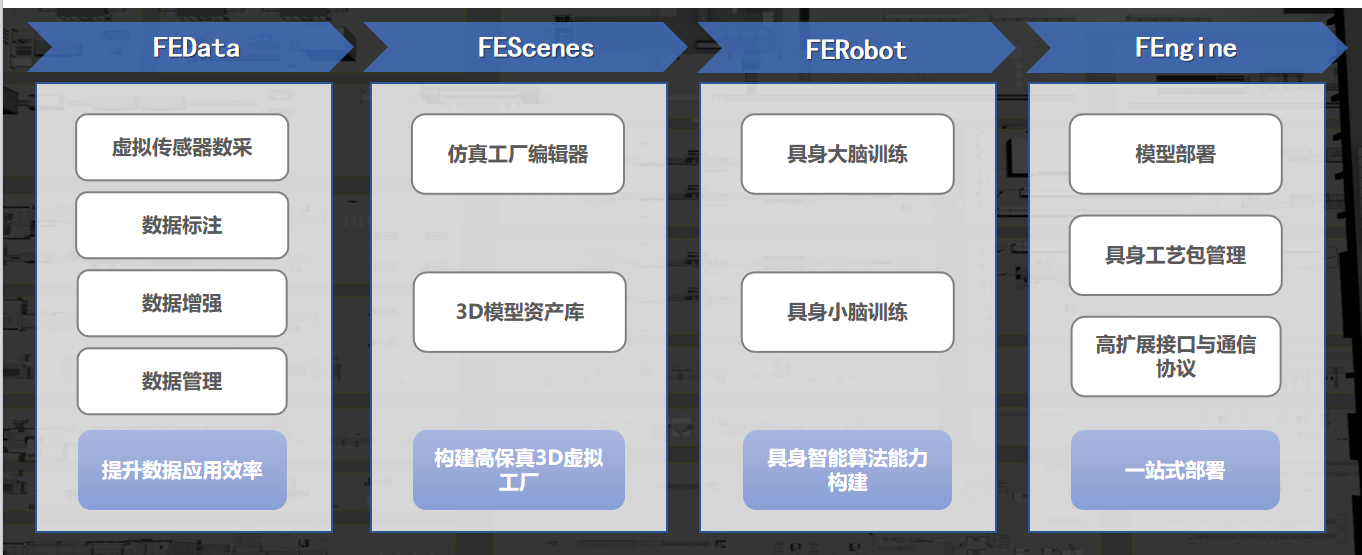
1) FEScenes(3D 工厂建模工具):提供 3D 模型资产库、工厂编辑器、机器人调试组件,支持规范化资产模型导入与管理,快速搭建高保真 3D 虚拟工厂。
2) FEData(数据服务工具链):实现多模态数据采集、可视化标注、数据增强、数据集管理,打造一站式数据中枢,提升数据应用效率。
3) FERobot(具身机器人大小脑训练工具):搭建大小脑训练引擎,支持强化学习、模仿学习、具身大模型训练,可构建训练流程、控制训练进度、评估训练效果,实现感知决策闭环训练。
4) FEngine(模型验证与快速部署工具):通过行为分析器实现任务精度评估与反馈优化,搭配任务编辑器组合机器人任务流,支持 Sim2Sim、Sim2Real 验证及一键式真机部署,提供具身工艺包管理与维护。
2.3核心技术参数
1)整体平台参数
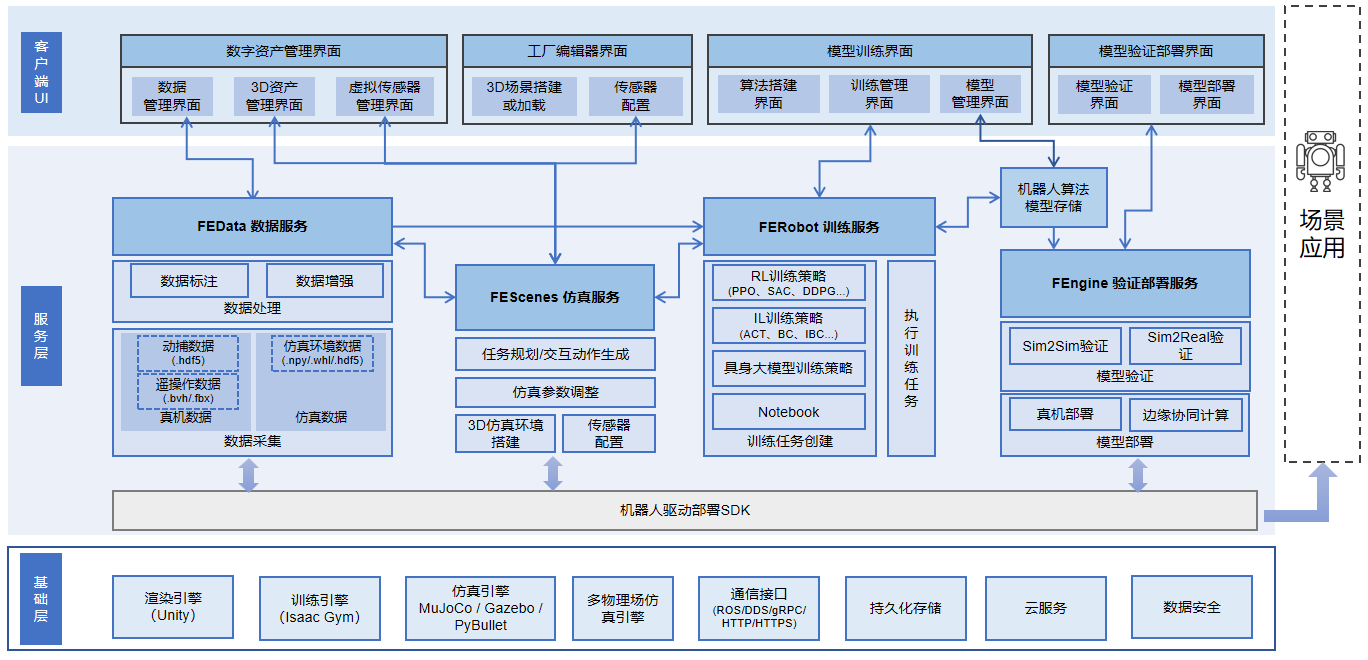
(1) 平台架构:采用分层架构(基础层 / 服务层 / 应用层),支持云边端协同计算,通信接口兼容 ROS/DDS/gRPC/HTTP/HTTPS,支持多协议无缝对接。
(2) 仿真引擎:集成 MuJoCo/Gazebo/PyBullet 多物理场仿真引擎,支持刚体、柔性刚体、软体、流体、触觉、磁性、声学多物理特性仿真,物理仿真精度≤0.1mm。
(3) 渲染引擎:基于 Unity 搭建高保真渲染引擎,支持实时渲染,渲染分辨率最高支持 4K,帧率≥30fps,还原工业真实场景视觉效果。
(4) 开发模式:支持低代码 / 无代码开发,提供可视化操作界面,支持拖拽式场景搭建、任务流配置,开发周期可缩短 2-3 周。
(5) 兼容性:兼容 Windows/Linux 操作系统,支持 Nvidia、AMD、华为昇腾等主流算力平台,支持 GPU 加速计算。
2)3D 工厂建模模块(FEScenes)技术参数

(1) 模型库资源:含 1000 + 工业专机模型、50000 + 标准化零部件模型,模型精度达 0.1mm 级,覆盖 100 + 工业工艺场景(搬运、焊接、装配等)。
(2) 模型格式支持:支持 OBJ、FBX、STL、glTF、URDF、MJCF 等主流 3D 模型格式,可实现格式自动转换与规范化校验。
(3) 场景搭建能力:支持拖拽式场景搭建,支持多机器人、多工位、多工艺线联动仿真,支持工厂布局自定义编辑。
(4) 机器人调试:提供可视化机器人调试组件,支持关节运动类型配置(旋转 / 平移)、运动轴校准、轨迹调试,支持数模绑定与实时测试。
3)数据服务模块(FEData)技术参数

(1) 数据采集类型:支持仿真数据、真机数据、动捕数据(.hdf5)、遥操作数据(.bvh/.fbx)等多类型数据采集,支持多模态数据(RGB、深度、力觉、触觉、关节角度等)同步采集。
(2) 数据处理能力:支持数据增强(域随机化、场景 clutter、光照变化等)、数据清洗、数据融合,支持自动化数据标注,标注精度≥95%。
(3) 数据管理:提供数据集分级管理功能,支持数据审核、版本控制、元数据存储,支持海量数据高效检索与调用,数据存储容量支持横向扩展。
(4) 数据接口:支持与主流数据标注工具、大数据平台对接,数据输出格式支持.npy/.whl/.hdf5 等。
4)模型训练模块(FERobot)技术参数

(1) 算法支持体系
l 强化学习:支持 PPO、SAC、DDPG、TD3、A2C 等主流算法,支持自定义训练策略。
l 模仿学习:支持 ACT、BC、IBC、BCQ、IQL 等算法,支持行为克隆与逆强化学习。
l 具身大模型:支持 VLA、OpenVLA、Diffusion Policy、Mobile ALOHA 等多模态具身大模型训练与微调。
l 传统算法:支持手眼标定、2D/3D 视觉感知、SLAM、全局路径规划、力反馈控制等工业机器人核心算法。
(2) 训练能力:支持具身智能 “大小脑” 协同训练,支持多任务并行训练,单任务训练步数最高支持 10^7 级,支持训练进度实时监控与断点续训。
(3) 评估能力:提供多维度模型评估指标(Average Return、任务成功率、轨迹偏差等),支持算法性能对比分析,生成可视化评估曲线。
(4) 算力适配:支持多 GPU 分布式训练,兼容 GeForce RTX 4090/4090 Ti、Radeon RX 7900 XTX、华为昇腾 910B 等算力设施。
5)验证部署模块(FEngine)技术参数
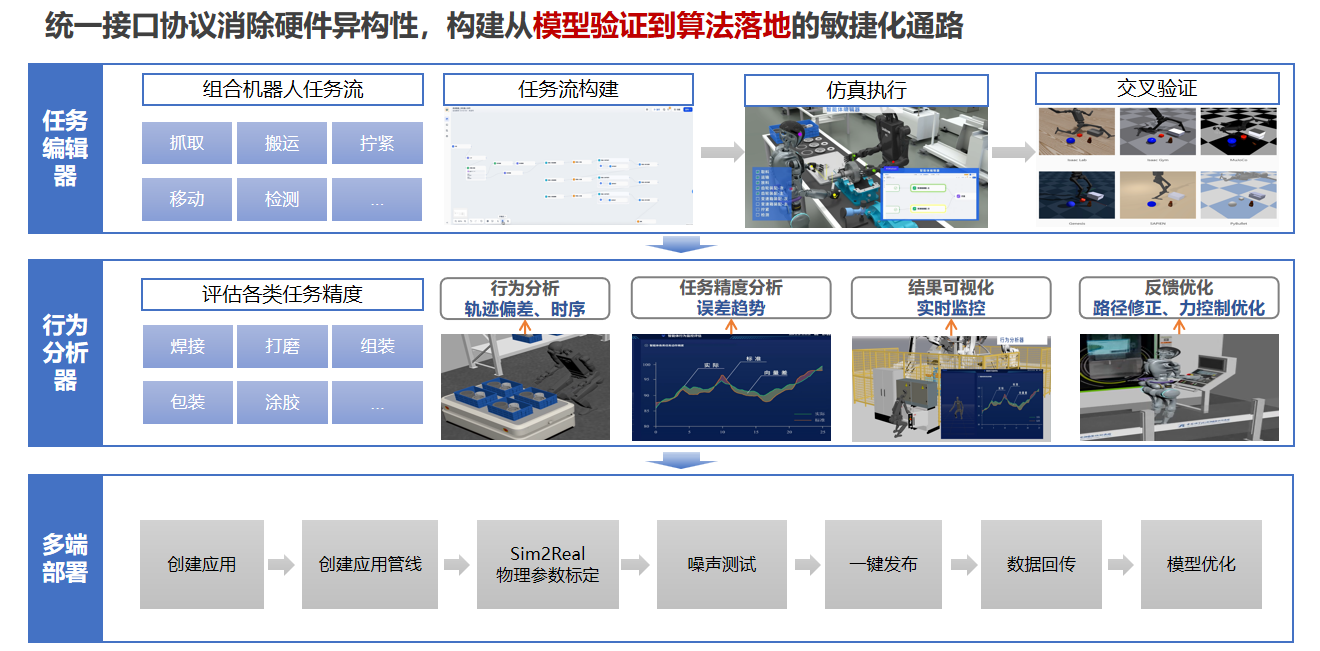
(1) 验证能力:支持 Sim2Sim、Sim2Real 双重验证,支持物理参数标定、噪声测试、模型优化,支持多场景交叉验证,验证结果与真机偏差≤5%。
(2) 行为分析:提供行为分析器,支持焊接、打磨、装配等工艺任务精度实时评估,支持轨迹偏差、时序误差分析,精度评估分辨率≤0.01mm,支持结果可视化与数据回传。
(3) 部署能力:基于 ROS2 实现 Sim2Real 无缝迁移,支持一键式真机部署,兼容工业协作臂、人形机器人、四足机器人等多类型本体,部署耗时≤24h。
(4) 工艺包管理:支持具身工艺包创建、管理、维护与版本控制,工艺包可复用率≥90%,支持工艺参数在线调整与优化。
平台应用场景
(一)教学端:新工科专业人才培养全环节支撑
聚焦机器人工程、智能视觉工程、自动化等新工科专业教学需求,覆盖基础实验、综合实验、创新实践与社会培训,夯实学生专业基础并提升工程实践与创新能力。
1. 基础教学实验
(1) 开展机器人认知类实验,让学生掌握高精度轻量化人形上肢双臂硬件的构型、自由度、传感器等核心硬件参数与工作原理;
(2) 完成机器人示教编程基础实验,熟悉运动控制器操作、关节运动配置、轨迹调试等基础操作;
(3) 开展机器视觉基础实验,利用头部相机等视觉感知设备,完成图像采集、视觉标定、基础视觉识别等实操训练。
2. 综合与创新实验
(1) 开展双臂协同装配实验,训练学生对机器人多自由度协同控制、力位混合控制的实操与调试能力;
(2) 完成视觉引导力控装配实验,结合多模态传感器与视觉感知技术,实现 “环境感知 - 运动规划 - 动作执行” 的闭环操作训练;
(3) 开展具身智能算法验证实验,让学生实操强化学习、模仿学习等算法的训练流程,掌握模型训练、效果评估与优化方法;
(4) 支撑学生创新项目、机器人大赛等赛事开发,提供虚拟仿真建模、真机部署的全流程平台,助力学生将创新思路落地为实际作品。
3. 产教融合类教学与服务
(1) 为高校智能制造、机器人装配、具身智能技术相关课程提供实训平台,实现课堂理论与工业实际场景结合;
(2) 支持高校面向企业开展社会培训,依托平台的工业场景适配能力,为企业技术人员提供具身智能技术、工业机器人实操等专项培训;
(3) 助力高校为中小企业提供技术研发与工艺优化服务,让学生在实际工业服务项目中提升工程应用能力。
(二)科研端:具身智能与机器人领域科研项目全流程支撑
为高校、科研院所的具身智能、机器人学、机器视觉、工业自动化等领域科研项目,提供从仿真建模 - 数据处理 - 算法训练 - 真机验证 - 成果转化的全链路平台支撑,同时支持开源协作。
1. 具身智能算法研发支撑
(1) 针对双臂协同装配、力位混合控制、视觉引导装配等工业核心场景,支撑强化学习(PPO、SAC 等)、模仿学习(ACT、BC 等)、具身大模型(VLA、OpenVLA 等)的训练、调优与验证;
(2) 提供 “大小脑” 协同训练能力,支撑任务规划、语义理解、推理决策(具身大脑)与精准运动控制、工艺操作(具身小脑)的协同算法研发;
(3) 支持多算法性能对比分析,提供 Average Return、任务成功率等多维度评估指标,助力算法效果验证与优化。
2. 工业机器人技术研发支撑
(1) 开展机器视觉相关科研,支撑 2D/3D 视觉感知、SLAM、手眼标定等核心算法的研发与真机验证;
(2) 进行机器人运动控制技术研究,针对高刚度、高灵巧度工业需求,开展力反馈控制、轨迹规划等控制算法的优化与测试;
(3) 支撑机器人本体与外设适配研究,兼容主流协作臂、具身机器人与工业传感器,开展硬件对接、控制算法适配与优化研究。
3. 工业工艺优化科研支撑
(1) 搭建工业级高保真虚拟场景,支撑焊接、涂胶、装配、打磨等工业装配工艺参数调试、轨迹优化的科研工作;
(2) 依托 Sim2Real 跨域验证能力,将虚拟场景中优化的工艺方案迁移至真机,开展工业现场工艺优化的实证研究,提升装配效率与精度。
4. 科研全流程技术保障
(1) 提供高精度 3D 工厂建模能力,0.1mm 级精度还原工业真实环境,为科研提供贴合实际的虚拟实验场景;
(2) 打造一站式数据中枢,支持仿真、真机、动捕等多源数据采集、标注、增强,破解科研训练数据匮乏难题;
(3) 支持 Sim2Sim、Sim2Real 双重验证,验证结果与真机偏差≤5%,保障科研成果从虚拟到真机的高效迁移;
(4) 提供开源协作能力,支持科研团队间的技术交流与成果共享,促进科研成果的快速转化与落地。
5. 算力与开发适配支撑
(1) 兼容 Nvidia、AMD、华为昇腾等主流算力平台,支持多 GPU 分布式训练,满足大规模算法训练的算力需求;
(2) 提供低代码 / 无代码开发模式,降低科研开发门槛,大幅减少非核心环节耗时,提升科研效率。





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1