
产品简介PRODUCT DESCRIPTION

力反馈遥操作机器人平台
联系电话:13720126958 / 13387619634产品特点
PRODUCT FEATURES
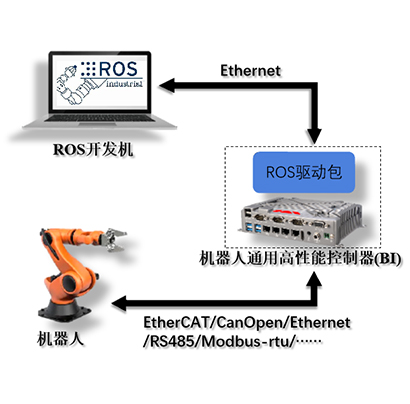
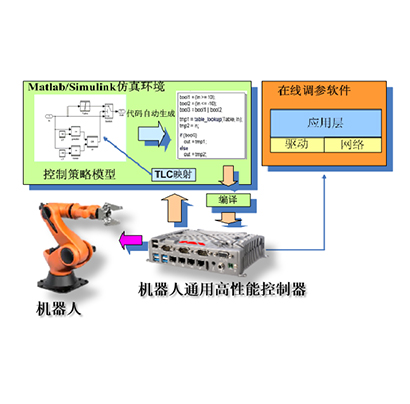
- 平台所用机械臂可以开放底层控制,支持机械臂底层力矩、速度、位置控制,支持用户基于Simulink软件进行控制算法真机部署验证;
- 完善的二次开发环境,配置完整的机器人运动学、动力学、运动规划和力控制计算库,易于二次开发;
- 支持多种类型的主手操控设备和从手机械臂设备,机械臂法兰同样支持多种通信扩展,工具扩展和系统集成便捷;
- 支持扩展3D视觉系统、从手机械臂末端六维力传感器;
- 支持扩展VR/AR辅助操作环境。
- 支持5G、WIFI6无线网络遥操作
科创实验及支撑课程
1、支撑课程
机器人感知与控制
真机控制
虚拟仿真
机器人学原理
机器人控制系统原理
电机控制
机电系统设计
2、科创环境搭建
2.1搭建力反馈遥操作机器人教学科研环境
可以基于Matlab/Simulink及Gazebo/V-rep仿真环境构建力反馈遥操作机器人数字孪生仿真系统,在仿真环境下对主手端机器人的运动学模型、从手端机械臂的运动学、动力学等建立模型,并对主从机械臂各自的标定、主手到从手的运动映射过程等过程进行仿真;可以建立从手机械臂的动力学模型,对从手运行过程中的柔顺力控、虚拟墙阻抗控制等进行仿真。仿真算法可以便利的部署于物理环境下的从手机械臂控制器进行验证。可以引入5G/TSN等新型通信媒介,分析通信延时对控制系统的影响和力反馈操作体验的影响。
2.2远程诊疗系统原型搭建
通过3D视觉系统,可以快速获取人体姿态和位置信息,生成位置限制虚拟墙,辅助人工进行远程诊疗操作。配置远程通信系统和人家交互软件,显示诊疗过程相关信息。

配置清单
CONFIGURATION LIST

说明:1、工业机械臂、遥操作手柄可根据用户实际需求进行调整更换;
2、可根据用户实际需求定制化搭建应用场景;





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1