
产品简介PRODUCT DESCRIPTION

机器人倒立摆控制开源平台
联系电话:13720126958 / 13387619634产品特色
PRODUCT FEATURES
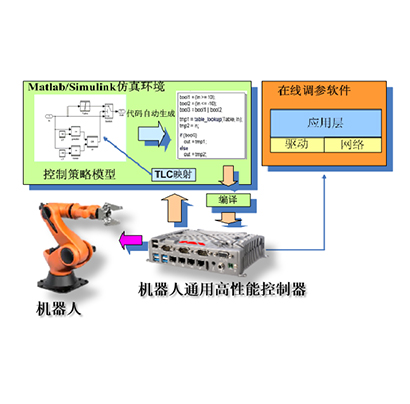
1、Matlab/Simulink下建立的动态系统数学模型应用于实时仿真、算法测试,便于全流程控制和局部算法验证。
2、高度集成的机器人编译环境保证了模型的可靠性、准确度及更小的仿真步长,提高了模型运算速度和控制精度。
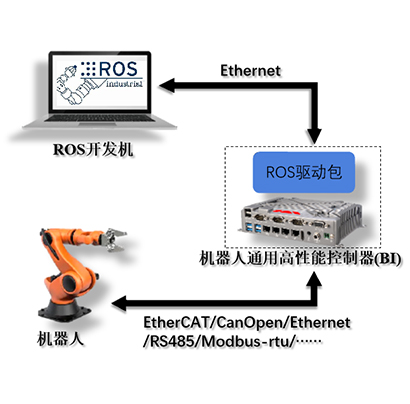
3、涵盖机器人基础理论和高级控制算法库,集成多种总线通讯模块,建立运动学、动力学模型,兼具视觉、力觉等处理能力。
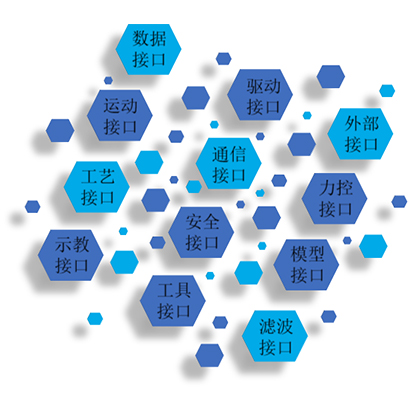
4、提供多层次开发接口,针对开发的深度不同,满足不同层次的开发需求,深度开放,满足定制化开发。
实验内容
PRODUCT FEATURES
基础实验:
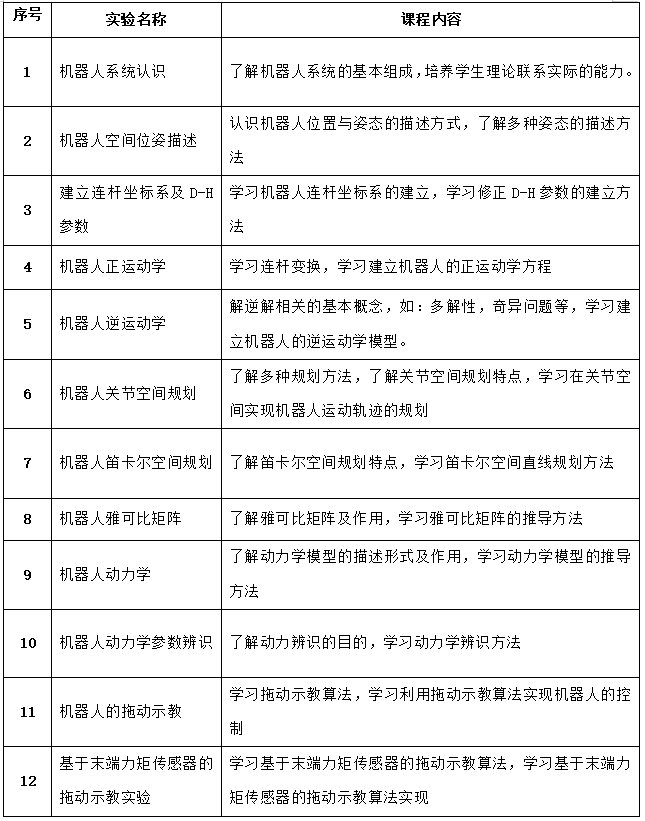
高级实验:

配置清单
CONFIGURATION LIST

说明:1、机器人倒立摆可根据用户实际需求进行调整更换;
2、可根据用户实际需求定制化搭建应用场景;





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1