
产品简介PRODUCT DESCRIPTION

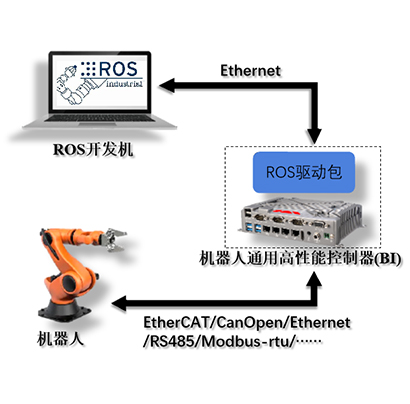
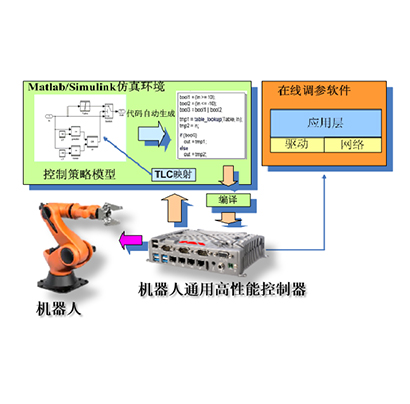
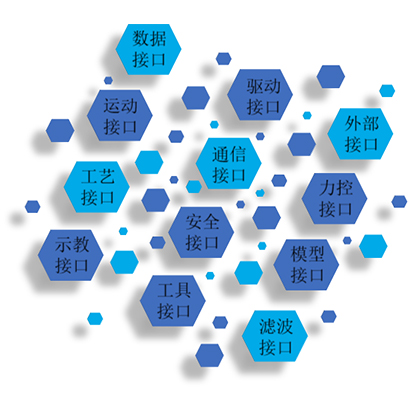
多机协同机器人实训开发平台
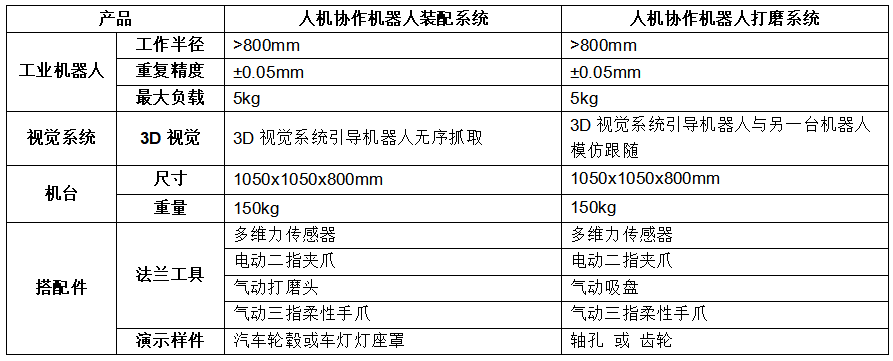
联系电话:13720126958 / 13387619634人机协作机器人装配系统采用六轴协作机器人,配合独立的高精度六维力传感器,实现轴孔或齿轮装配等力位混合控制。人机协作机器人打磨系统主要通过协作机器人多维度的力反馈控制完成复杂3D轮廓产品的力控打磨。实验平台用于功能任务实训或二次开发,既适合学生入门培训和实验,也可以适合企业项目前期仿真、工艺测试等研究。平台采用模块化设计,能够方便功能扩展。
主要展示内容:
1、轴孔或齿轮装配等力位混合控制
2、多维度的力反馈控制完成复杂3D轮廓产品的力控打磨
3、3D视觉引导机器人无序抓取
4、柔性手抓对不规则物体的抓取
5、对水果等其它易损易变性物体的无损伤抓取
6、双机器人协调装配
7、机器人模仿跟随





客户服务电话:
027-87018711
 扫描二维码关注我们
扫描二维码关注我们
联系电话:李经理 13720126958 陈经理 13387619634 邮箱:wheckert@126.com
公司地址:湖北省武汉东湖新技术开发区关东街道汤逊湖北路36号武汉理工大科技园新能源研发基地2栋6层603B
版权所有 ©2019-2050 武汉艾克特科技有限公司 鄂ICP备19030040号-1